


Principy řízení modelu rádiem

Pilot drží v ruce vysílač a pohyby ovládacích pák, kterým se říká kniply, ovládá kormidla modelu. Řídit lze model až na hranici viditelnosti modelu, vysílače mají dosah běžně jeden jeden a půl kilometru. Omezením je zrak pilota, ne dosah vysílačky. Dělají se přijímače, se kterými je dosah menší, důvodem je miniaturizace pro malé modely-
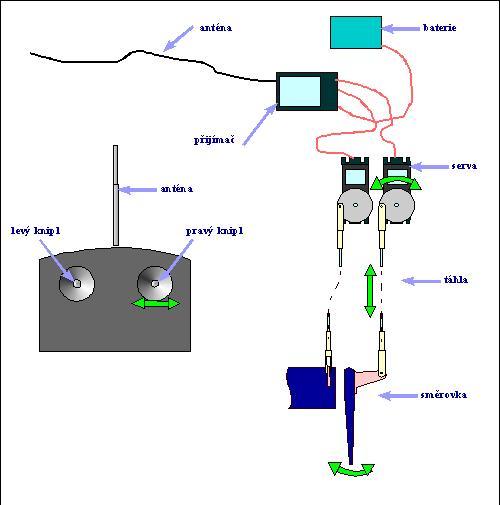
Poloha ovládací páky na vysílači je v pravidelných intervalech zaznamenávána, zakódována a rádiovým signálem přenesena do přijímače v modelu. Zde je poloha dekódována a po kablíku předána do serva. Servo nastaví výstupní páku do odpovídající polohy. Tím se posune táhlo, které přenáší pohyb páky serva na páku kormidla. Tak se kormidlo vychýlí do polohy odpovídající výchylce páky na vysílači.
Rádio může přenášet 2 povely (směrovka/křidélka + výškovka), 3 povely (směrovka nebo křidélka + výškovka + ovládání motoru), 4 povely (křidélka + výškovka + směrovka + ovládání motoru), 5 povelů (křidélka + výškovka + směrovka + ovládání motoru + klapky) atd. Tomu se říká, že je rádio dvoukanálové, tříkanálové, čtyřkanálové, sedmikanálové atd.
Mimo plynulého ovládání, kdy každé poloze ovládací páky na vysílači odpovídá určitá poloha kormidla (tomu se říká proporcionální ovládání), může vysílač obsahovat dvoupolohové přepínače, které se používají třeba k ovládání zatahování podvozku. Nebo třípolohové přepínače. Ty přepínače potřebují každý jeden kanál vysílače. Nebo je možné na jednom kanálu ovládat třeba 8 dvoupolohových výstupů - to se využívá při ovládání stavebních strojů nebo lodí.
Aby se modeláři, kteří létají současně, navzájem nerušili a řídili svůj model a ne cizí, je přenos u rádií pracujících v pásmu 2.4 GHz vymyšlen tak, že přijímač komunikuje jen s vysílačem, se kterým byl takzvaně "spárován". V tomto pásmu se používá datový digitální přenos a v rámci protokolu přenosu si vysílač a přijímač předají informaci, zda má přijímač vysílač poslouchat či ne.
U starších rádií pracujících v pásmu 35 MHz musí piloti provozovat svá rádia na odlišných kanálech. Může se stát, že se na jednom místě sejdou dva s vysílačem pracujícím na stejném kmitočtu a kanále, v tom případě může létat jen jeden z nich, musí se domluvit.
V podstatě není třeba se principem ovládání modelu rádiem zabývat. V běžné praxi bude rádio fungovat a tak, jako můžete jezdit s autem a nemusíte nic vědět o fungování motoru, tak můžete i létat s modely. Není však na škodu princip ovládání modelu znát.
Je ale třeba vědět, že moderní RC soupravy komunikují na principu datového přenostu. Porozumění přijímače s vysílačem zajišťuje takzvaný protokol přenosu. A v tom je trochu háček. Každý výrobce rádií používá vlastní protokol. Z toho plyne, že musíte používat vysílač a přijímače od jednoho výrobce.
