


Test modulů GPS 
14.4.2026
Elektronika v modelech a okolo modelů - GPS v modelech
Oscar Liang provedl 4/2026 test modulů GPS.
Viz: oscarliang.com
Elektronika v modelech a okolo modelů - GPS v modelech
Oscar Liang provedl 4/2026 test modulů GPS.
Viz: oscarliang.com
dokumentace: github.com/iNavFlight/Modes
Stroj v tomto módu není stabilizovaný, řízení je plně na pilotovi, pohyby kniplů jsou bez korekce flight controllerem přenášeny na kormidla.
Je to mód, kdy se letadlo řídí stejně, jako se řídí běžný model nevybavený flight controllerem.
V tomto módu je doporučeno provádět zálet stroje. Stroj by měl mít, než se začnou ladit ostatní stabilizované a navigační módy, nastaveno vhodně těžiště, kormidla by měla mít správné a přiměřené výchylky.
V tomto módu se dá zjistit cestovní rychlost stroje a tomu odpovádající poloha plynu - délka signálu plynu v ms. V tomto módu se dá zjistit pádová rychlost. V tomto módu se dá zjistit poloha plynu pro stoupání.
Exponenciální výchylky - také se říká S charakteristika se nenastavují ve vysílači, realizuje je flight controller. Viz EXP
ACRO je default mód systému. Nepřepíná se na něj, v tomto módu je stroj vždy, když není v jiném módu. Vypíná ho mód MANUAL.
Zásahy do řízení prochází korekcí od flight controlleru, výchylky kniplů jsou brány jako pokyny k rotaci - náklonu, sklonu. A ty rotace jsou omezeny maximální rychlostí rotace nastavenou v INAV. Ve své podstatě jde o stabilizovaný režim, letadlo drží náklon a sklon.
Podmínky fungování:
Udává se v desítkách stupňů/sec. 1 zmamená 10 stupňů/sec.
Udává se v desítkách stupňů/sec. 1 zmamená 10 stupňů/sec.
ANGLE je rozšířením módu ACRO. Letadlo letí srovnané, drží křídla v horizontu. Pokud ho poryv vychýlí ze směru, letí v novém směru, nedrží kurs. Při zásahu do řízení křidélky jde letadlo do náklonu, ale jen do maximálně povoleného náklonu. Při zásahu do řízení výškovkou mění letadlo podélný sklon, ale zase jen do maximálně povoleného sklonu.
V tomto módu nejde udělat výkrut ani přemet.
Řízení výkonu motoru je na pilotovi.
Podmínky fungování:
Mód HORIZON vychází z módu ANGLE. Náklon ani sklon není omezen, s letadlem lze udělat výkrut, s letadlem lze udělat přemet.
Po puštění kniplů se letadlo srovná do horizontu.
Řízení výkonu motoru je na pilotovi.
Podmínky fungování:
INAV umí v brýlích zobrazit menu, ve kterém se nastavují parametry pro flight controller. Normálně se parametry nastavují v počítači v programu INAV Configurator, touto cestou se některé věci dají nastavit venku bez počítače. Model musí být nezaarmované, menu se vyvolá gestem kniply vysílače. Pro mě to je knipl plynu do středu a výškovku od sebe a doleva.

zdroj: mrd-rc.com/tutorials-tools-and-testing
Jak se menu prochází a jak se hodnoty nastavují zjistíte snadno, když budete hýbat kniply.
Pro akce, jako třeba přepínání profilů akumulátorů, když používáte dvoje rozdílné akumulátory, je to šikovná věc. Pro nastavování výstupů na jednotlivá serva se to nehodí. Je lepší mít sebou notebook.
Co je potřeba k provozování INAV:
Dost často vídám, že mají lidi problém s anténami přijímačů. Zlomené ty fousky na konci, které tvoří vlastní anténu. Musí potom shánět anténu náhradní a vyměnit ji. Dá se tomu celkem snadno zabránit.
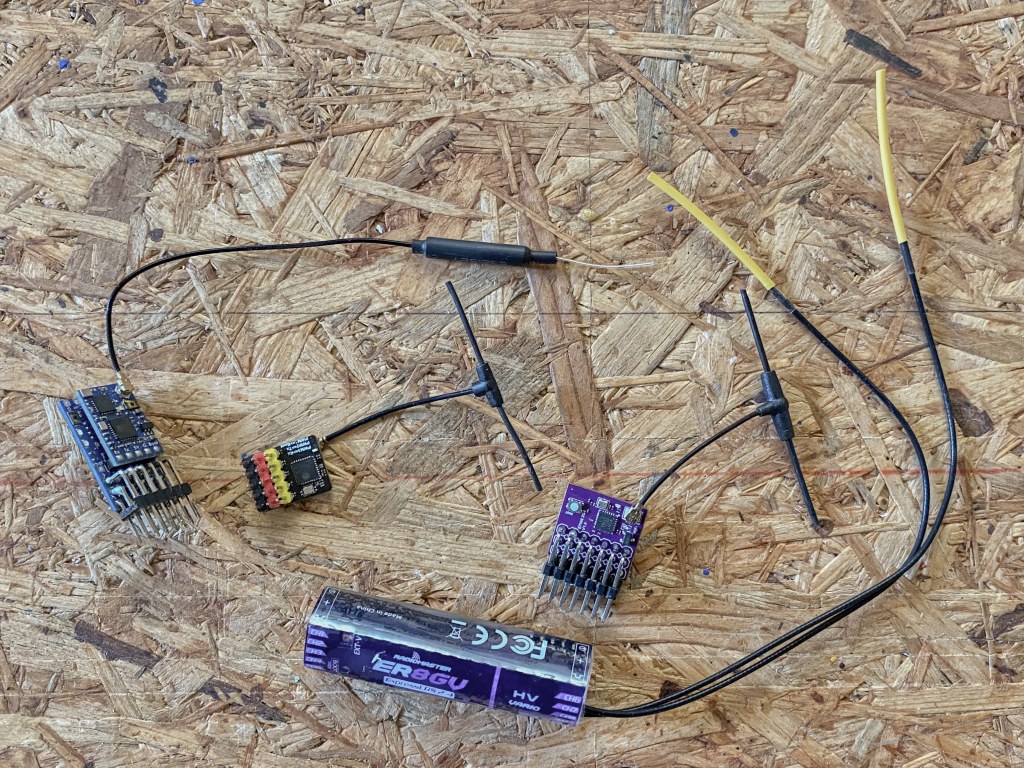
Já natahuji na konec antény bužírku. To je to žluté na fotce. Přijímače Jeti to mají z výroby, nevím, proč to ostatní výrobci nedělají taky tak.
Natáhnu bužírku a v místě, kde je převlečená přes tu silnější izolaci, ji opatrně teplem smrštím. Kdo se bojí, může bužírku zajistit lepidlem.
 Starší
Starší