5.4.2021
Na tomto letadle jsem si ověřil:
- provoz systému s flight controllerem
- záchránu letadla, pokud přijdu o obraz v brýlích - autonomní let RTH - návrat nad místo vzletu v definované výšce
- létání s FPV brýlemi DJI FPV
- OSD: vzdálenost od místa vzletu, směr domů, zbývající kapacita akumulátoru, aktuálně odebíraný proud, výška, rychlost
- práci s telemetrií na displeji vysílače
- zpracování záznamu letu - logu z vysílače
- zpracování logu z flight controlleru
- ovládání kamery z vysílače: natáčení kamery do stran
- zpracování videozáznamu uloženého v air unit DJI FPV
- zpracování videozáznamu uloženého v brýlých DJI FPV, vložení titulků s telemetrií
Použité komponenty:
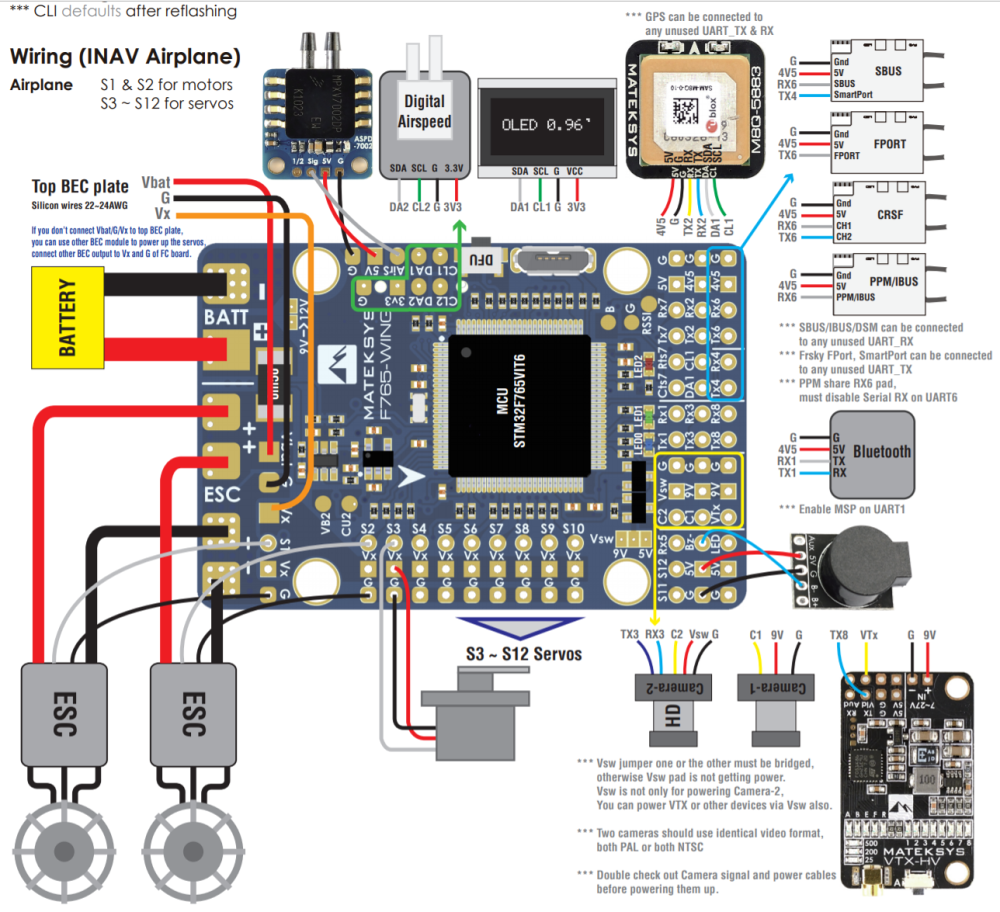
Propojení komponent:
- FC S1 - regulátor levého motoru (u regulátoru odpojit prostřední červený kablík +5V)
- FC S2 - regulátor pravého motoru (u regulátoru odpojit prostřední červený kablík +5V)
- FC S3 - servo výškovky
- FC S4 - servo směrovky
- FC S5 - servo levého křidélka
- FC S6 - servo pravého křidélka
- FC S7 - servo otáčení kamery
- FC RX6 – přijímač signál SBUS
- FC 4V5 - přijímač 5V SBUS
- FC G - přijímač Gnd SBUS
- FC TX4 - přijímač signál Smart Port
- <nepřipojeno> - přijímač 5V Smart Port
- <nepřipojeno> - přijímač Gnd Smart Port
- FC 4V5 - GPS 5V
- FC G - GPS G
- FC TX2 - GPS RX
- FC RX2 - GPS TX
- FC DA1 - GPS DA
- FC CL1 - GPS CL
- FC G - DJI FPV air unit Power GND - černý
- FC 9V - DJI FPV air unit Power - červený
- FC TX8 - DJI FPV air unit Uart RX - bílý
- FC RX8 - DJI FPV air unit Uart TX - šedý
- <nepřipojeno> - DJI FPV air unit Signal GND - hnědý
- <nepřipojeno> - DJI FPV air unit DJI HDL - žlutý
17.4.2021
Twinstar je řízený flight controllerem se systémem INAV
a je požadováno nepoužívat mixy, S-charakteristiky, trimy.
Všechno se nastavuje v Inavu.
Já ale létám hodně v režimu MANUAL, kdy flight controller do řízení nehrabe,
a chybí mi možnosti, které mi můj vysílač nabízí.
A určitě mi chybí možnost trimování.
Tak jsem začal přemýšlet, jak tento rozpor pořešit.
Řešení je celkem jednoduché.
Tak jak přepínám přepínači INAV z MANUAL na stabilizované a navigační režimy,
tak současně stejným přepínačem na vysílači přepínám také
na jiný letový režim ve vysílači v EdgeTX u kterého mám oddělené nastavení trimů.
Letím-li si volně v režimu MANUAL, mohu klidně trimovat výškovku, křidélka i směrovku
a neovlivním tím ostatní režimy řízení INAVu, ty budou mít pořád trimy ve středu.
Požadavek mít možnost trimovat v NEautomatickém režimu letu je celkem zásadní.
Bez toho se stává volné létání nepříjemným.
Řízení v režimu MANUAL je v principu stejné jako je létání s běžným RC modelem
a u běžných modelů je trimování zásadní věcí.
Létá se za různých povětrnostních podmínek, v bezvětří nebo za větru, v klidném vzduchu nebo v turbulenci,
trimováním výškovky se nastavuje žádoucí režim letu.
Trimování křidélek a směrovky je zase nutné, když kormidla změnou teploty nepatrně ujedou ze středu.
Aby letadlo bylo na řázení příjemné, aby pilotáž neunavovala, mělo by letadlo po puštění kniplů letět rovně stálou rychlostí.
A k tomu jsou potřeba ty trimy.
28.3.2026
Pořídil jsem Headtracker XF a něco času jsem s ním odlétal s Lentusem.
Došel jsem k tomu, k čemu jsem došel třeba u vztlakových klapek,
že mi stačí jen několik diskrétních poloh směřování kamery.
Proč? Kamera je hodně širokoúhlá a vidím to samé jestli kamera kouká do strany 30° nebo 45°.
A když použiju záběr z této kamery do svého videa,
tak mi vadí pohyby kamery, jak se na ni přenáší nechtěné pohyby mé hlavy.
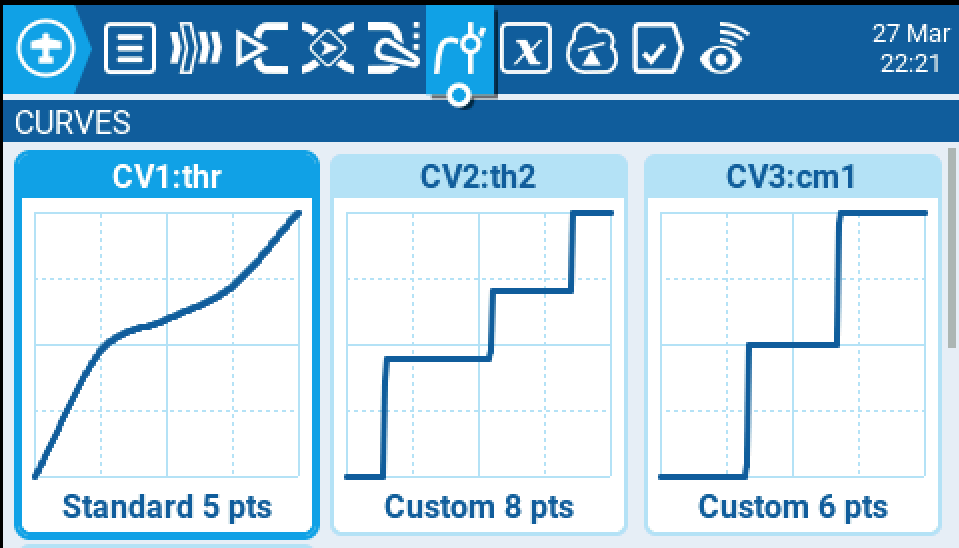
Tak vznikla myšlenka otáčet kameru jen do několika diskrétních poloh pomocí křivky.
Založil jsem si křivku cm1 jako "cam 1".
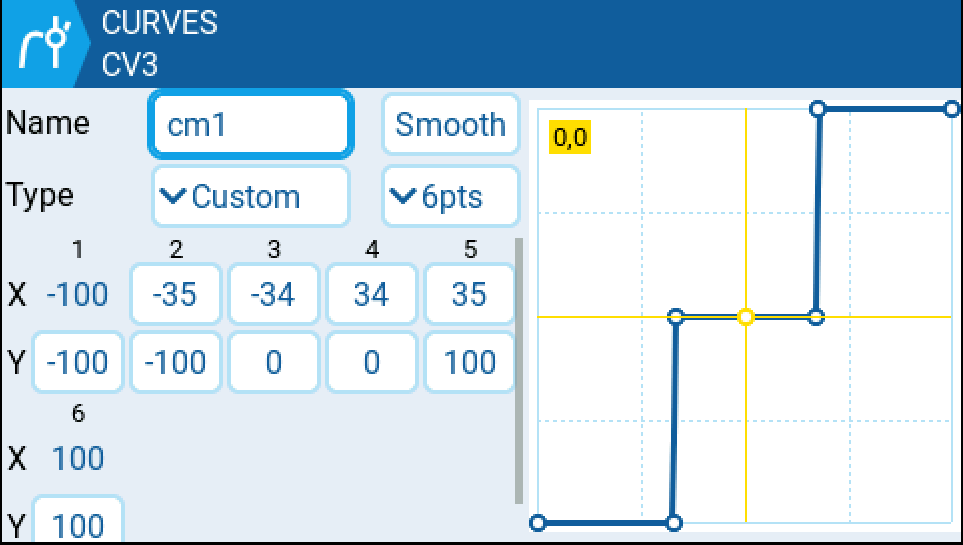
Při zkoušení v dílně a z rekapitulace natočených videí mi vyplynulo,
že mi stačí jen tři pohledy kamery:
přímo dopředu,
doleva na křídlo 90°,
doprava na křídlo 90°.
Nějaká poloha mezi tím kolem 45° se mi jeví zbytečná.
Uvidíme.
Nastavím si to u TwinStara.
6.3.2021
Revize v souvislosti s výměnou gps modulu a předěláním kabeláže:
Propojení komponent:
- FC S1 - regulátor levého motoru (u regulátoru odpojit prostřední červený kablík +5V)
- FC S2 - regulátor pravého motoru (u regulátoru odpojit prostřední červený kablík +5V)
- FC S3 - servo výškovky
- FC S4 - servo směrovky
- FC S5 - servo levého křidélka
- FC S6 - servo pravého křidélka
- FC S7 - servo otáčení kamery do strany
- FC S8 - servo otáčení kamery nahoru dolů
- FC S9 - napájení ventilátoru airunit DJI
- FC TX6 - přijímač RX
- FC RX6 – přijímač TX
- FC 4V5 - přijímač 5V
- FC G - přijímač Gnd SBUS
- FC 5V - GPS 5V
- FC G - GPS G
- FC TX7 - GPS RX
- FC RX7 - GPS TX
- <nepřipojeno> - GPS DA
- <nepřipojeno> - GPS CL
- FC G - DJI FPV air unit Power GND - černý
- FC 9V - DJI FPV air unit Power - červený
- FC TX8 - DJI FPV air unit Uart RX - bílý
- FC RX8 - DJI FPV air unit Uart TX - šedý
- <nepřipojeno> - DJI FPV air unit Signal GND - hnědý
- <nepřipojeno> - DJI FPV air unit DJI HDL - žlutý



