15.11.2024
Po shlédnutí popisů různých konstrukcí jsem se rozhodl takto.
Mechanicky by konstrukci měly tvořit duralové profily 20x40 a 20x20 typu V-SLOT.
V profilech budou běhat speciální kolečka.



Pohony budou dvojího druhu.
Vodorovný posuv bude zajišťovat ozubený řemen, krokový motor bude součástí vozíku,
řemen bude nepohyblivě spojen s rámem.
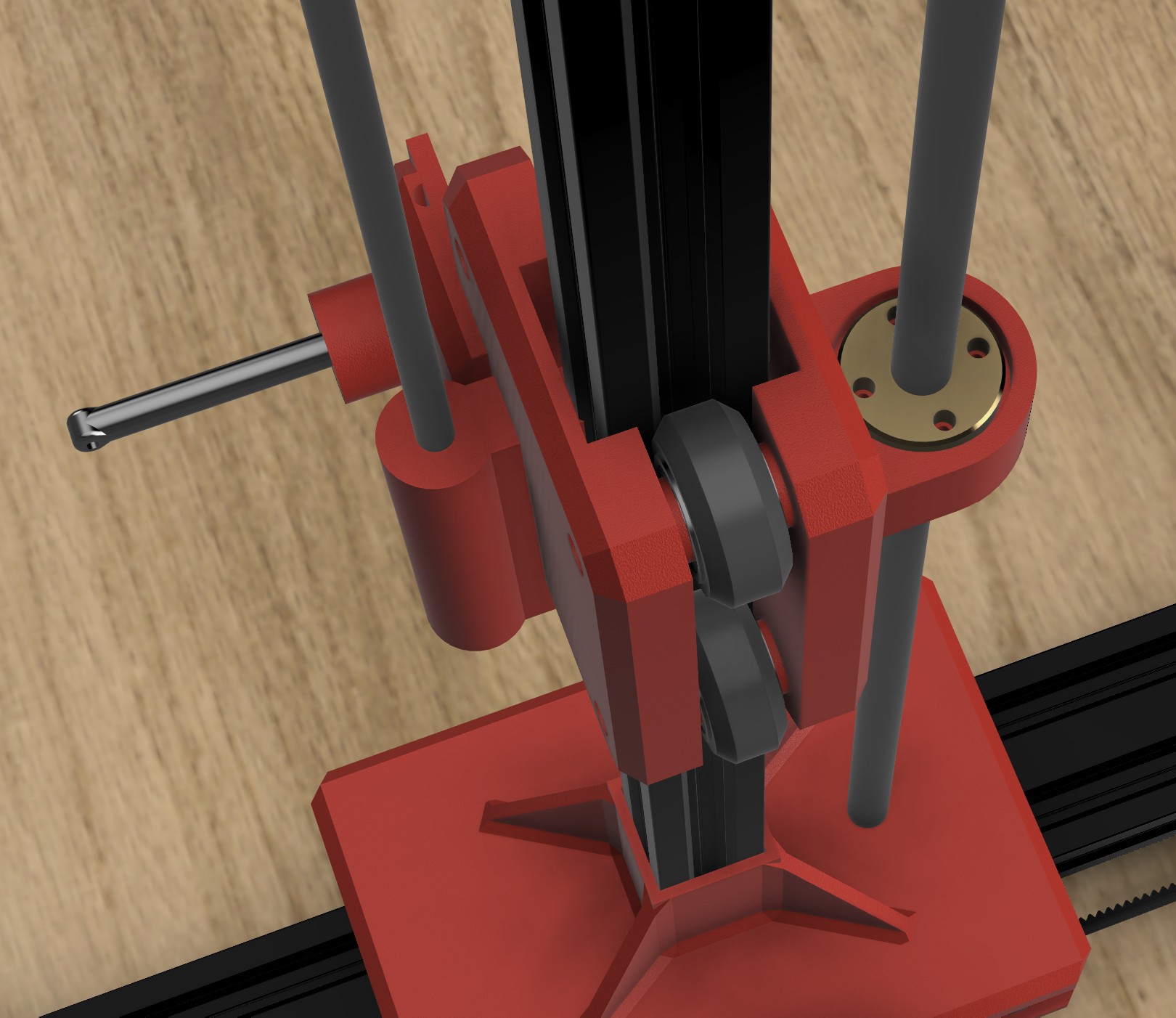
Svislý posuv bude zajišťovat trapézová tyč a matice.
Armatury budou vytištěny.
22.11.2024
Pro konstrukci řezačky je nutné stanovit si nějaké zadání
- Jak mají být dlouhé pojezdy?
- Jak budou pojezdy mechanicky řešeny?
- Jak budou pojezdy poháněny?
- Jak pořeším napínání drátu?
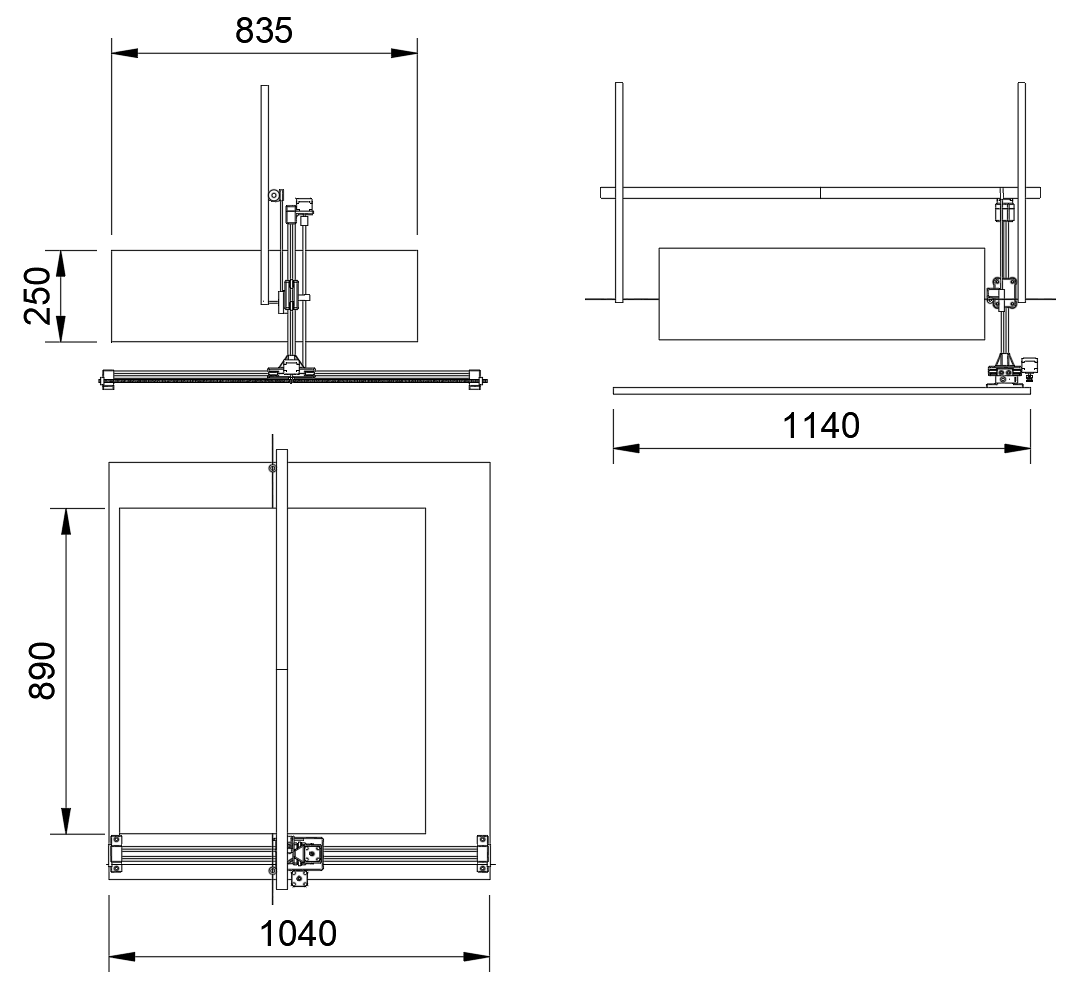
Jak mají být dlouhé pojezdy? Koukl jsem na různé konstrukce a zjistil, v jakém rozsahu jezdí.
Koukal jsem na modelářské využití. Vyšlo mi zadání, že by to mělo jezdit
600 mm po stole (vodorovně) a 450 mm nahoru dolů (svisle).
Jak budou řešeny pojezdy?
Viděl jsem různá řešení
- pojezdy na tyčích
- podepřené tyče
- pojezdy z nábytkových šuplíkových výsuvů
- pojezdy po trubkách jako MPCNC (
The Mostly Printed CNC
)
- pojezdy po duralových jeklech
- pojezdy po speciálních duralových profilech V-slot
Po shlédnutí popisů různých konstrukcí jsem se rozhodl pro V-slot duralové profily 20x40 a 20x20.
Pojezd je realizovaná speciálními kolečky.
Jak na napínání řezacího drátu? Viděl jsem
- pružinu
- zavěšenou „klasická rámovou pilu“, stejnou, jakou se řeže ručně
- napínání motorem https://www.youtube.com/watch?v=KfWDov1mHDg
Zvolil jsem řešení se zavěšenou rámovou pilou,
to jediná nezanáší sílu napínání do konstrulce řezačky.
Napínání motorem je sice zajímavá technická úloha, ale v kontextu mého zadání složita blbost.
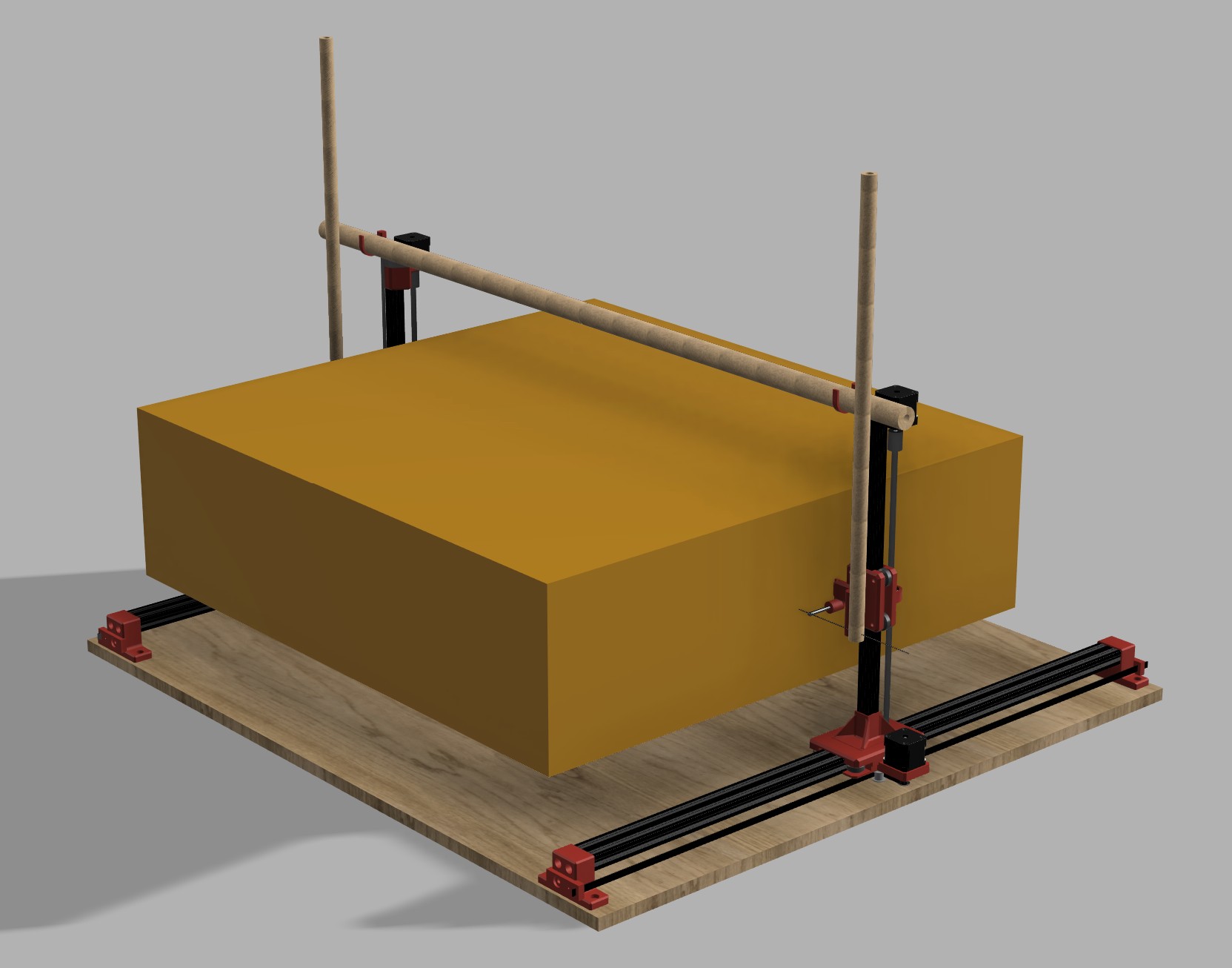
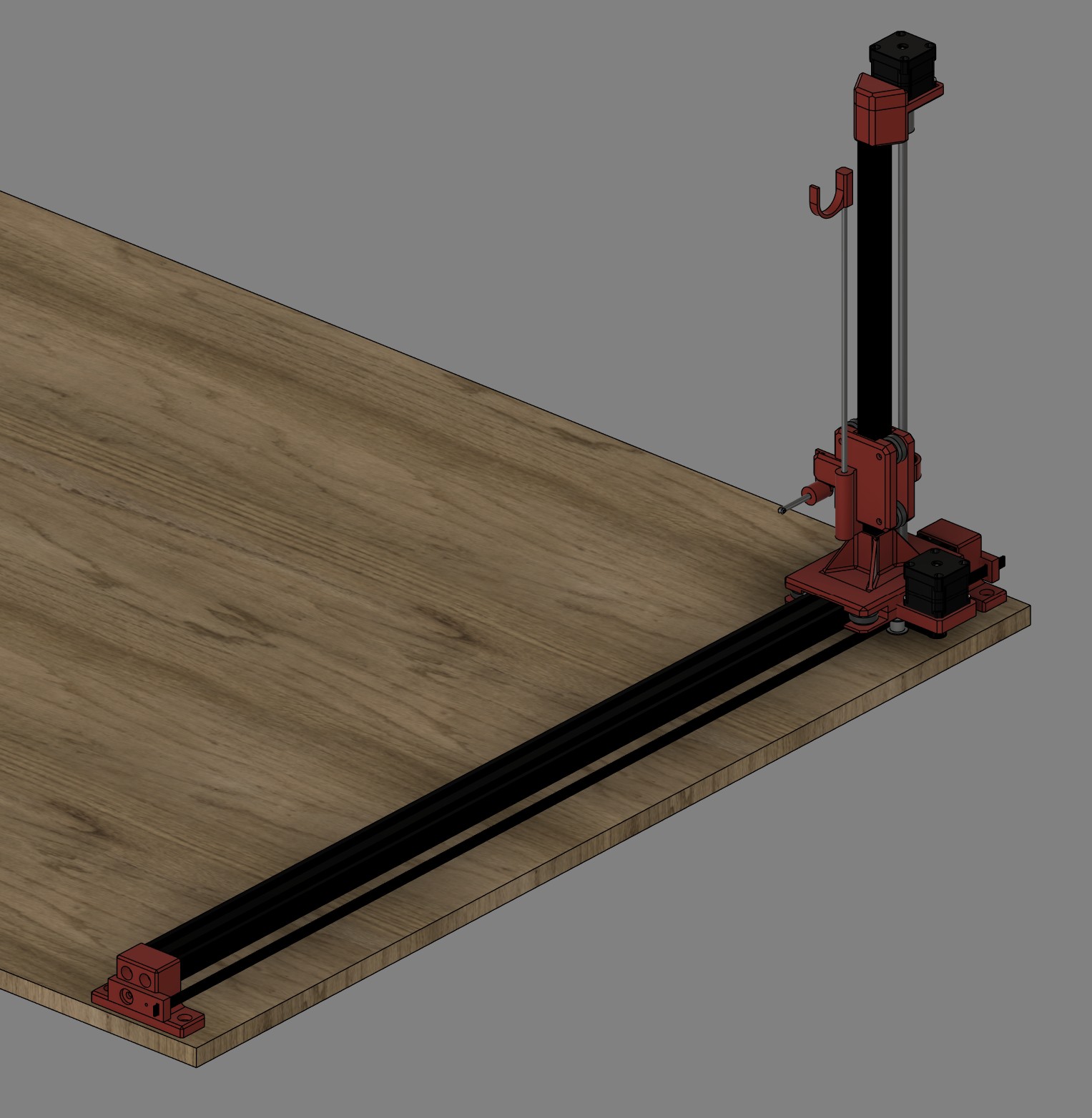
Model i podklad pro výrobu stroje dělám ve Autodesk Fusion.
Umožňuje mi to vidět celkové řešení a jeho kinematické vlastnosti.
Pojezdy lze v modelu pohybovat vodorovně i svisle a mohu si tak ověřit,
zda si komponenty v některých polohách nepřekáží vzájemně.
Zároveň si mohu ověřit velikost obrobitelného bloku
při navržených rozměrech komponent stroje.
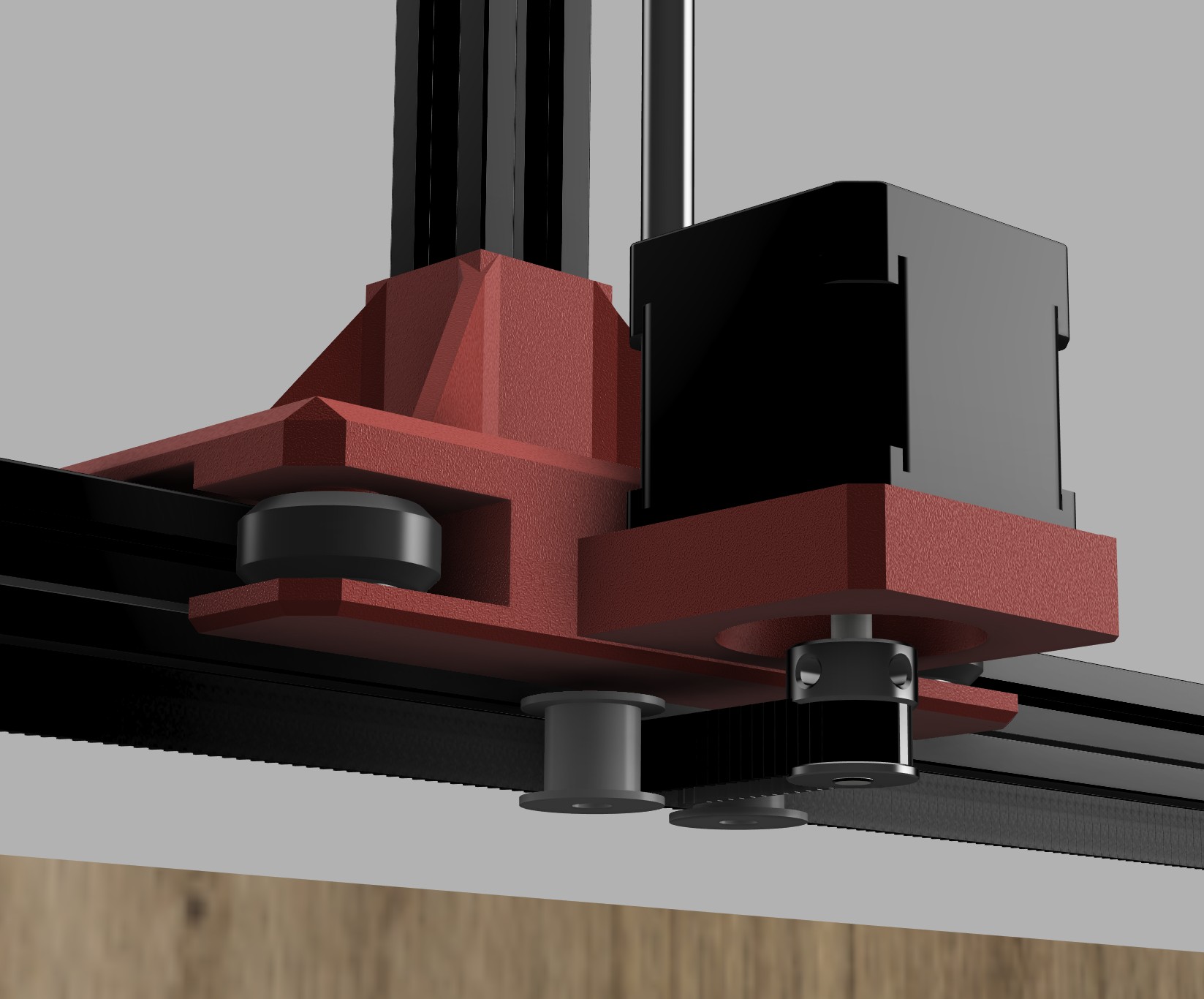
Pohony budou dvojího druhu.
Vodorovný posuv bude zajišťovat ozubený řemen,
krokový motor bude součástí vozíku, řemen bude nepohyblivě spojen s rámem.
Svislý posuv bude zajišťovat trapézová tyč a matice.
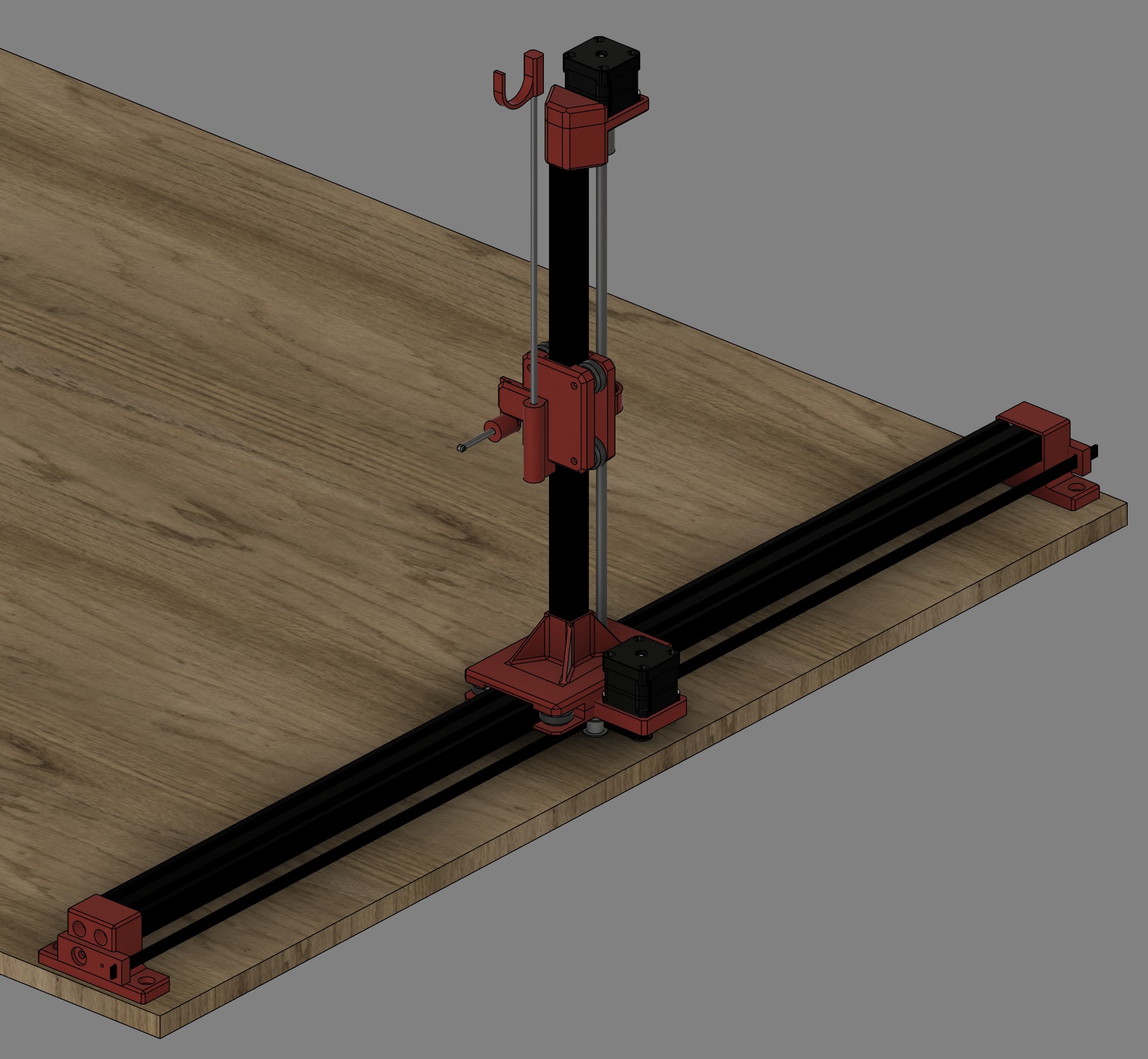
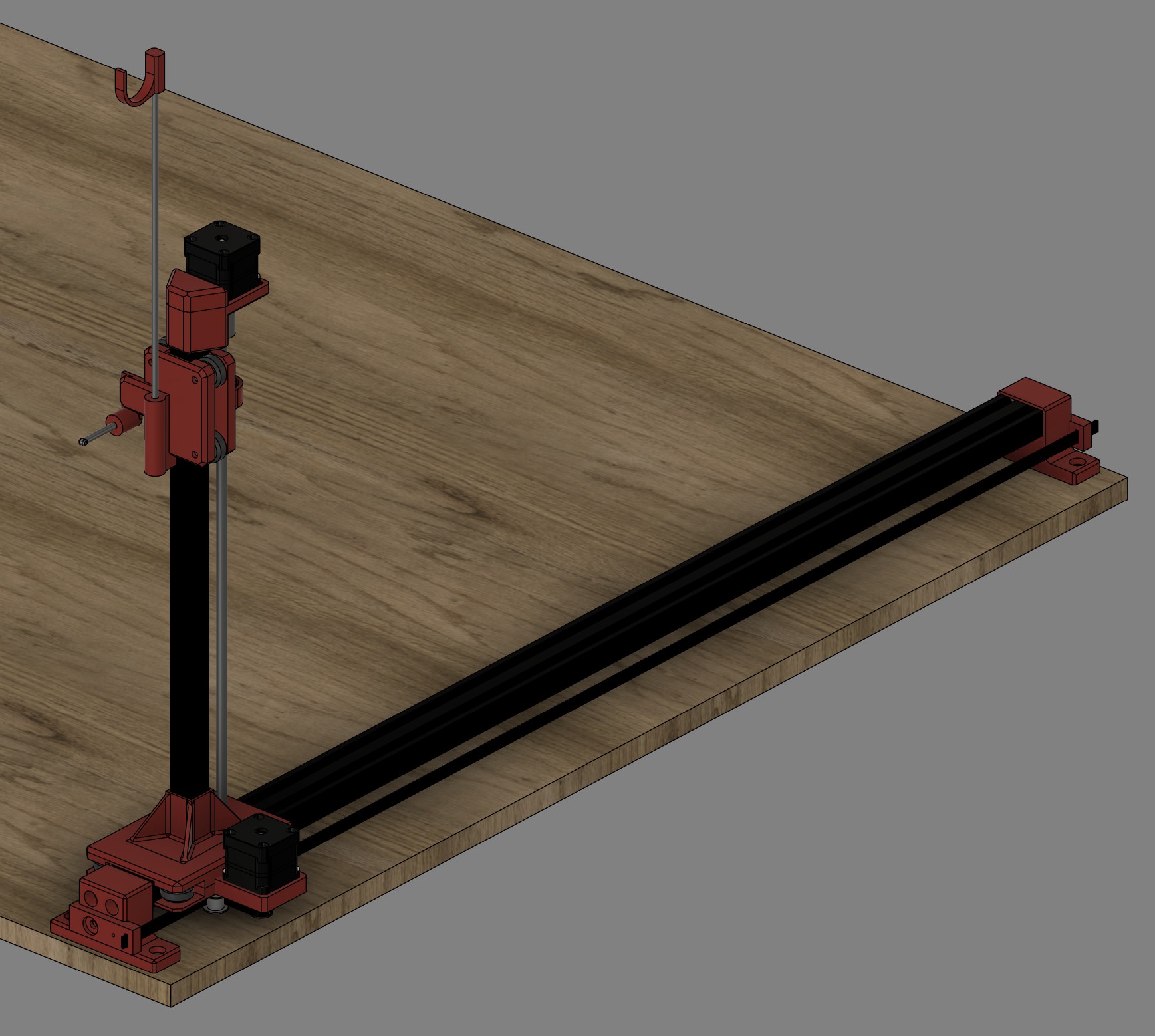
Vytvoření modelu mi zabralo cca týden po večerech. Červené díly se budou tisknout z PETG.
Z vytvořeného modelu ve Fusion 360 budu díly exportovat do Průša Slicer, vytisknu je
a sestavím jednu stranu stroje - jeden vodorovný a svislý pojezd.
Na prototypu si vyzkouším mechanické vlastnosti a ovládání programem.
Mohl bych ty věci uspořádat mnoha jinými způsoby, motor vodorovného pojezdu by mohl být napevno a tahat řemenem vozík, motor svislého pojezdu by mohl být dole atd. atd.
Lepší je si to vyzkoušet. Lepší je si vyrobit prototyp a zjistit v reálu co jak funguje.
24.11.2024
Kolečka vodorovného pojezdu jsem umístil na bok profilu.
Z hlediska směru působení sil v ložisku kolečka to není výhodné.
Dává mi to ale možnost profil kdekoli podepřít, pokud by mi vadil jeho průhyb.
Pokud se toto uspořádání neosvědčí, celé to otočím o 90 stupňů.
Profil 40 x 20 dám nastojato.
24.11.2024
Stojí přede mnou otázka: Kde musí být koncáky? Nahoře nebo dole?
Nalevo nebo napravo?
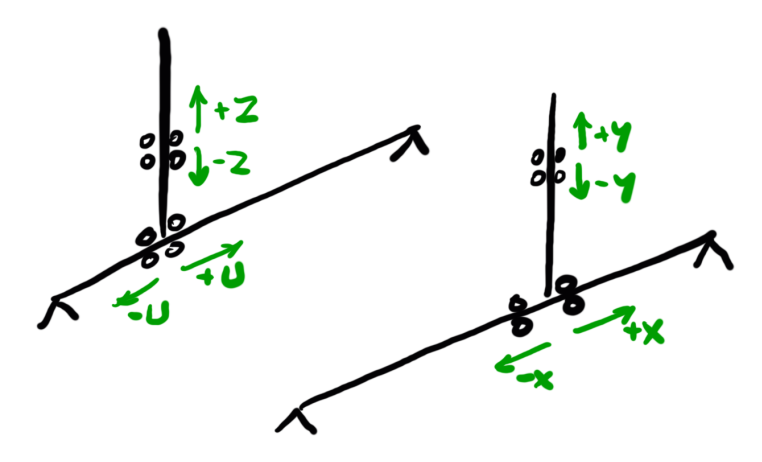
Jak je to se souřadnou sestavou?
Teď už potřebuji vědět podrobněji, jak systém ovládání stroje má fungovat
a kde mají být nuly souřadného systému stroje. A musí být koncáky v počátku souřadnic osy? Nevím!
Podle různých zdrojů je moje současná představa souřadného systému tak, jak ukazuje náčrtek.





