Oživení elektroniky 
Oživení elektroniky mohu provést nezávisle na tom, jak si vymyslím mechanické řešení. Jde o řízení 4 krokových motorů a jediné, co je závislé na mechanickém řešení konstrukce je potřebná síla motorů. Na základě referencí jiných stavitelů jsem určil, jaké motory potřebuji a vše jsem objednal. (soupiska zde: Koncept)
Ty věci se dají koupit v Číně, nechtěl jsem ale dlouho čekat a tak jsem objednával u nás. Prodejci, od kterých jsem bral, jsou uvedeni na stránce Prodejci. Všechno přišlo v pořádku a prakticky obratem.
Návod na oživení je na Keithově stránce: Electronics build guide - arduino mega 2560 ramps 1.4
Potřeboval jsem kleštičky štípačky, šroubováky, voltmetr a kousek kablíku - licny z dílenských zásob. K oživení není třeba nějaké velké odbornosti, stačí opatrnost, aby si to člověk nevyšlusoval a neodpálil. Dají se ty věci do sebe nastrkat obráceně, je třeba postupovat s rozvahou. Ale jinak na tom nic není.
Všechno na první zapojení funguje, jel jsem v tomto pořadí:
- Připojil jsem Arduino usb kabelem k PC s Win11, svítí zelená LED, bliká oranžová. Arduino je napájeno z PC via USB kabel.
- Arduino se objevilo ve správci zařízení jako COM3
- stáhl jsem firmware - odkaz na download zde: rckeith.co.uk
-
rozbalil jsem stažené a spustil xloader.exe
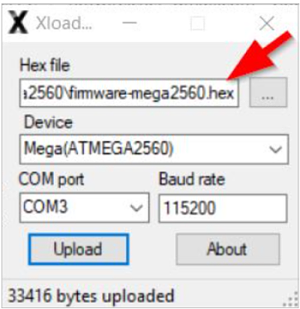
- spustil jsem upload, LED v průběhu přenosu blikaly, upload úspěšný, svítí zelená LED, oranžová slabě žhne
- ze složky grblHotWire jsem, spustil setup.exe a provedl instalaci programu
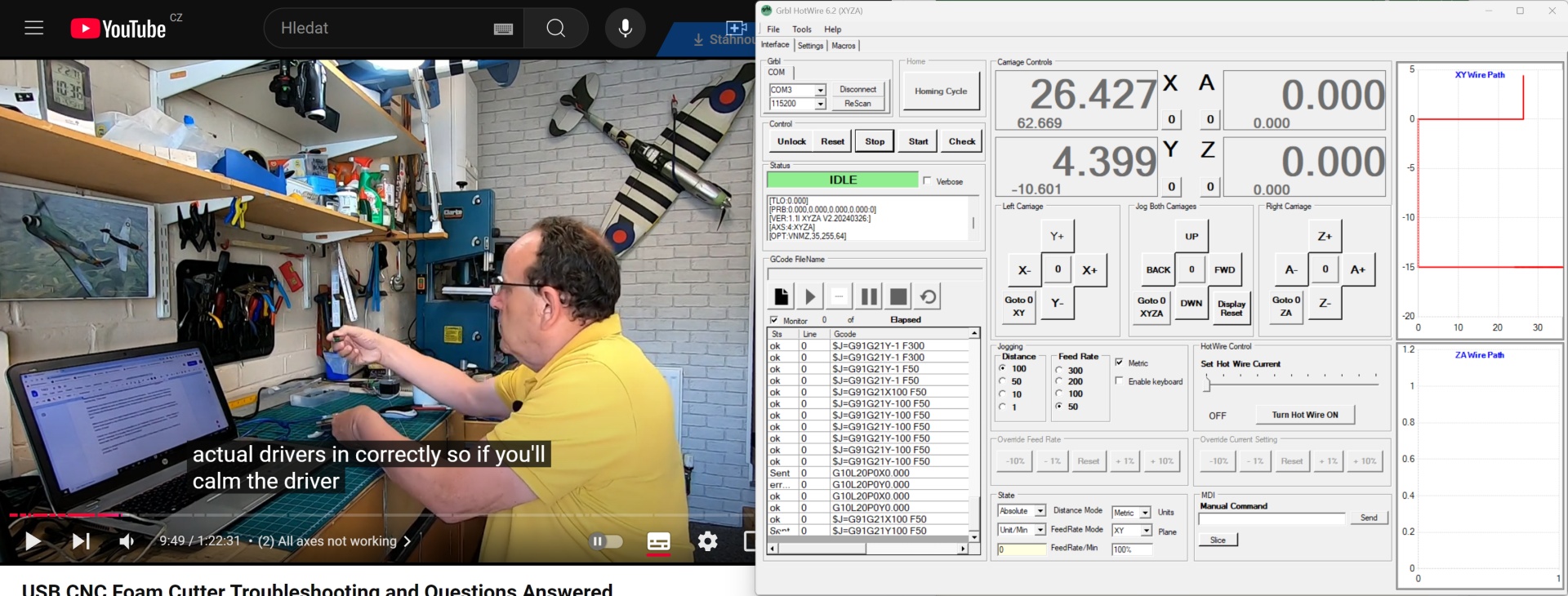
- spustil jsem v PC program GrblHotWire 6.2, nastavil COM3, kliknul rescan a connect; zelená LED svítí, oranžová žhne
-
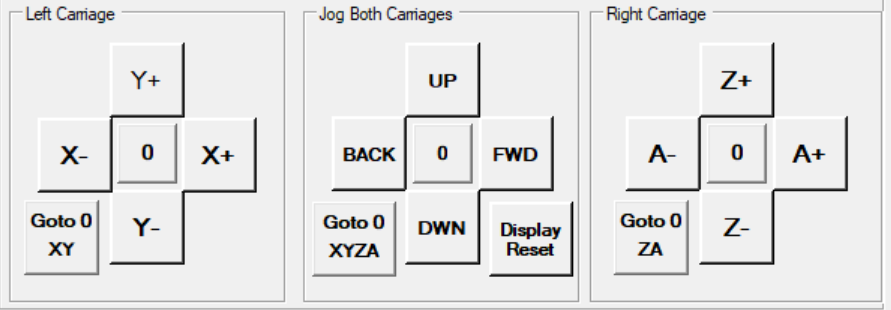
Při kliknutí na tlačítka jogu deska reaguje, dvojice oranžových LED bliká,
nabíhají souřadnice vozíků
- Odpojil jsem Arduiono od počítače-
- Nalepil jsem chladiče na integrovaný obvod driverů DRV8825.
-
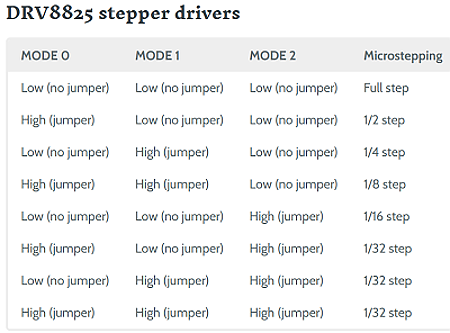
Nastavil jsem na desce RAMPS 1.4 propojkami pod paticí pro drivery mikrosteping 1/8
-
Jak mají být orientovány DRV8825 v paticích desky RAMPS jsem zjistil na stránce
reprap.org/wiki/RAMPS_1.4
.
Zajímá mě pozice nožičky GND - zem. Na dskách jsou titěrné popisky,
lze si pomoci vyfocením mobilem a přečtením zvětšeného obrazu na jeho displeji.
Napoví fotografie od jiných stavitelů ne webu.
Pozor ale, je víc verzí desek DRV a každá verze ma jinde švába a jinde trimr.
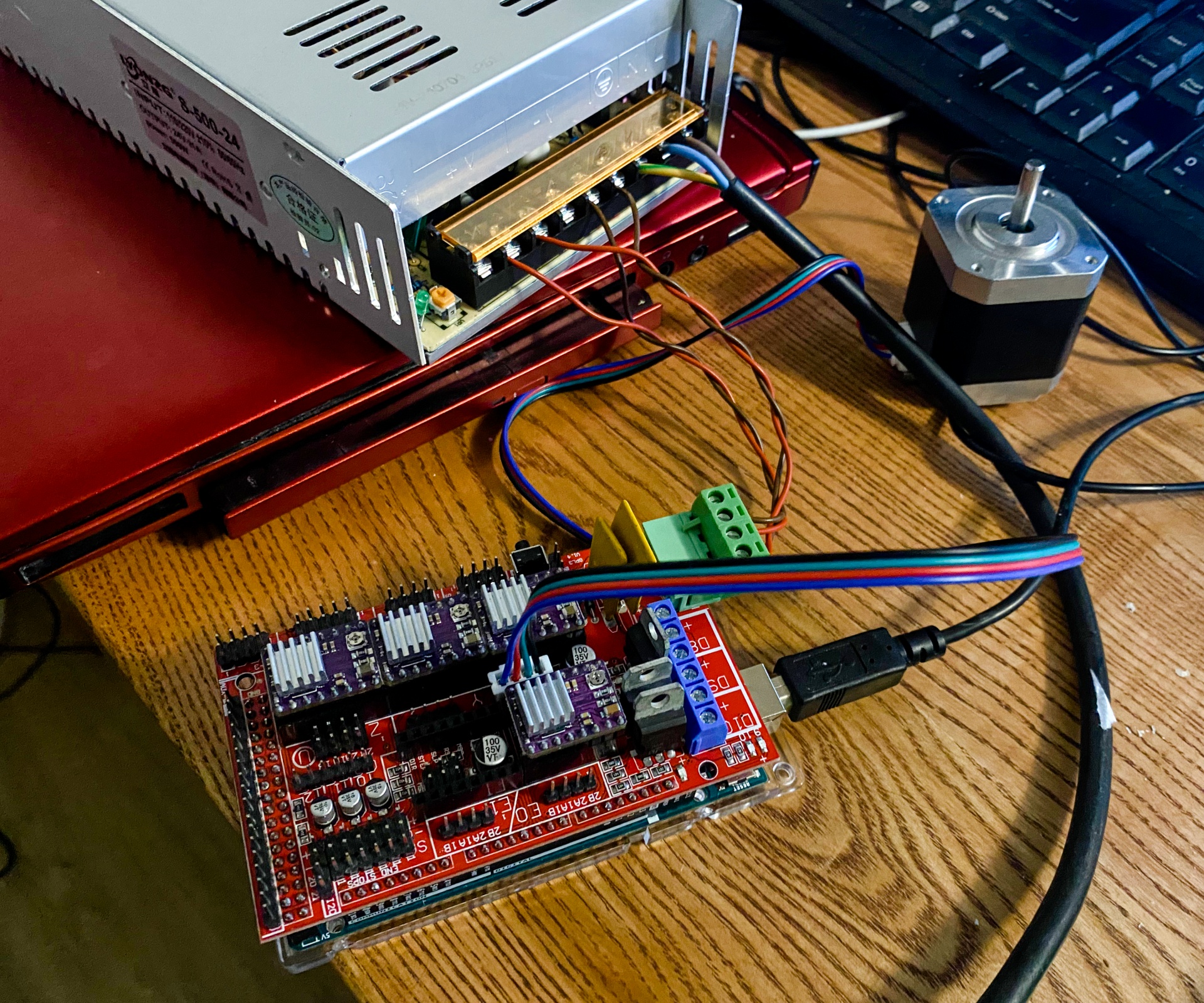
Nastrkal jsem čtyři DRV8825 do patic na RAMPS do pozic označených X,Y, Y a E0.
Nasunul jsem desku RAMPS na desku Arduina. Nešly dorazit, vadily si vzájemně černý plastový konektor napajení na Arduinu a vývody zeleného konektoru napájení desky RAMPS. Dva vývody toho zeleného konektoru jsem na spodku desky přibrousil Dremelem.
- Zkontroloval jsem nastavení síťového zdroje 12V na 230V.
-
Zapojil jsem flexo šňůru do svorkovnice zdroje:
- zelenožlutý na svorku uzemnění
- hnědý na svorku L - fáze
- modrý na svorku N - nulák
- Zapojil jsem zdroj do sítě 230V a změřil, zda je na svorkách stejnosměrné napětí 12V. Zdroj jsem odpojil ze sítě.
- Na svorkovnici síťového zdroje jsem na svorky 12V připojil čtyřmi kablíky zástrčku pro napájení desky RAMPS. Pozor, dutinky konektoru jsou na střídačku plus - mínus - plus - mínus.
- Zapojil jsem zdroj do sítě 230V a změřil, zda je na dutinkách konektoru napětí ve správné polaritě. Zdroj jsem odpojil ze sítě.
- Ke svorkám 12V zdroje jsem připojil přívodní kablík ventilátoru 12V
- Spočetl jsem si, jaké napětí Vref mám nastavit na driverech DRV, aby dávaly do motorů 1.5A. Vyšlo mi 0.75V. Vzoreček je Vref = I/2.
- Konektor napájení 12V jsem zasunul do konektoru desky RAMPS.
- Arduino jsem USB kabelem připojil k počítači.
- Na počítači jsem spustil program GrblHotWire a kliknutím na Connect jsem ho připojil k Arduinu.
- Zapnul jsem síťový zdroj.
- Z ničeho se nekouří, mohu nastavit Vref napětí na všech čtyřech driverech. Dělá se to otáčením trimru na driveru, napětí se změří přímo na tom běžci trimeru. Jeden hrot voltmetru na mínus přívodu napájení 12V, druhý hrot na běžci trimru. Protože i když motory stojí a neotáčí se, teče do nich proud. Je proto dobré ventilátor nasměrovat tak, aby ofukoval chladiče driverů.
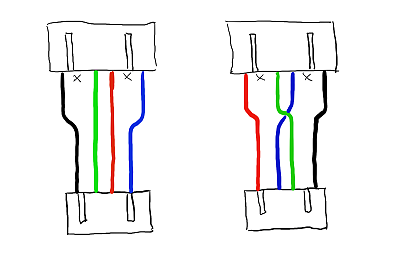
- Vypínám napájení 12V a odpojuji Arduino od počítače. Ke krokovým motorům připojuji propojovací kabely a konektory kabelů nasunuji na vývody na desce RAMPS.
-
Arduino jsem USB kabelem připojil k počítači.
Na počítači jsem spustil program GrblHotWire a kliknutím na Connect jsem ho připojil k Arduinu.
Zapnul jsem síťový zdroj.
Při kliknutí na tlačítka jogu na displeji počítače deska reaguje, dvojice oranžových LED bliká,
nabíhají souřadnice vozíků a motory se otáčejí.
Je třeba pochopit, jak komunikace probíhá.
Každý klik posílá do Arduina jeden příkaz g-code a ten se vykoná.
Až se vykoná celý, vykoná Arduino další příkaz g-code,
který jsme tam kliknutím na tlačítko na obrazovce poslali.
Motory se tak točí postupně. Až poběží opravdický program, budou se točit všechny najednou,
protože v programu jsou příkazy, k jejich vykonání stačí zlomky sekundy a příkazy nejsou jen posuvy ve směru os, ale i pohyby po uhlopříčce nebo do oblouku.
Chladiče na driverech by měly mít přiměřenou teplotu, měl by se dát na nich udržet prst.
Tím jsem si vše odzkoušel na stole.