7.4.2021
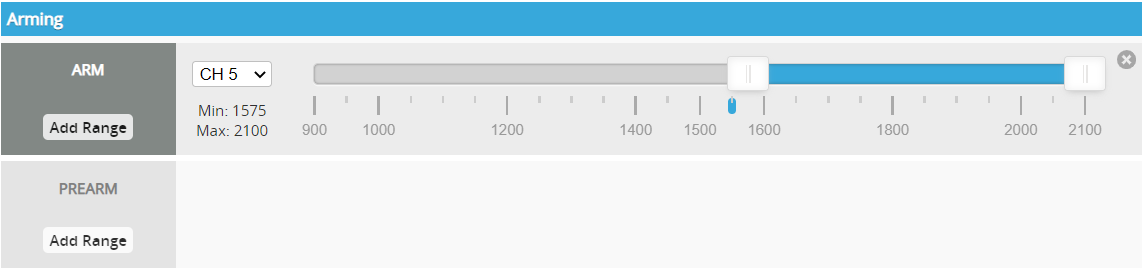
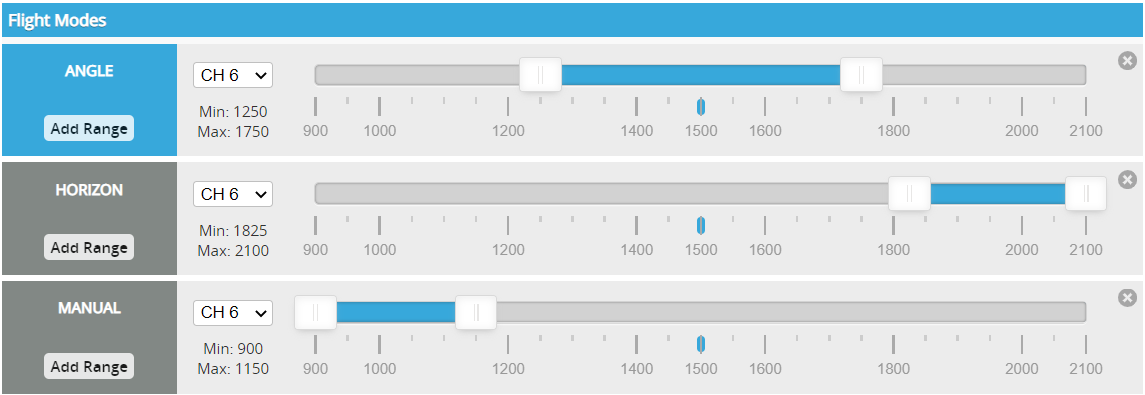
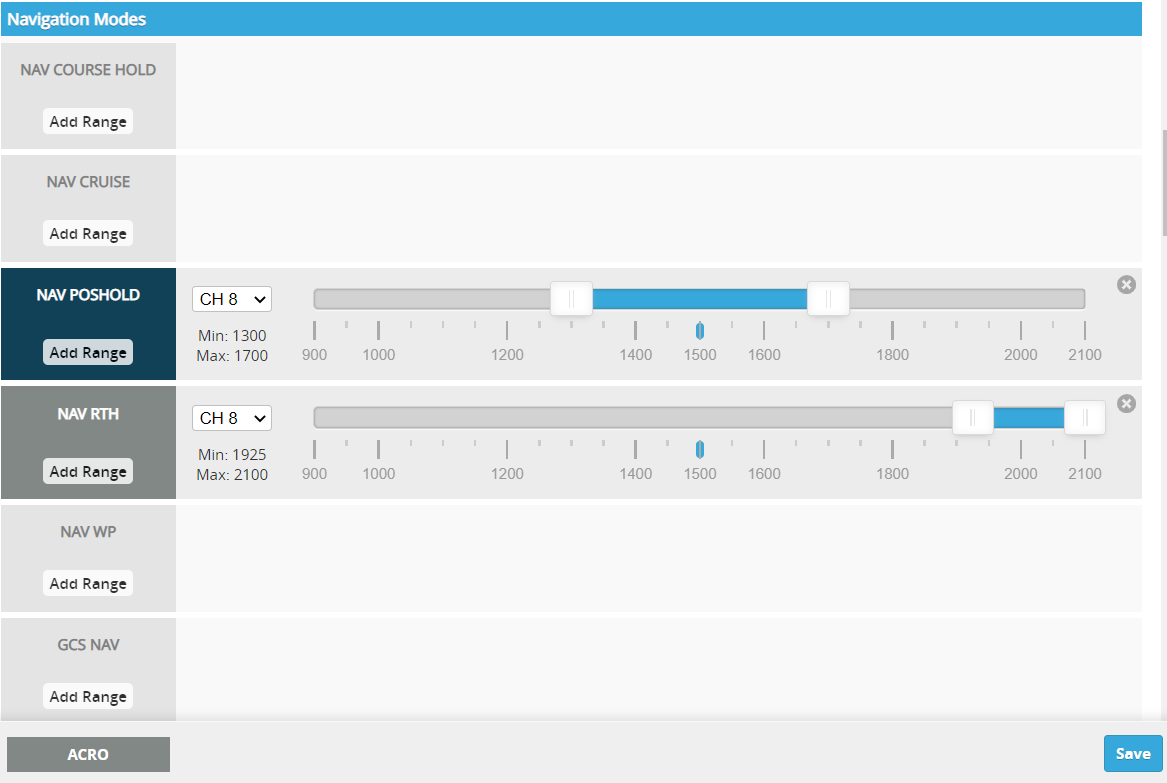
Systém INAV jsem nastavil takto:
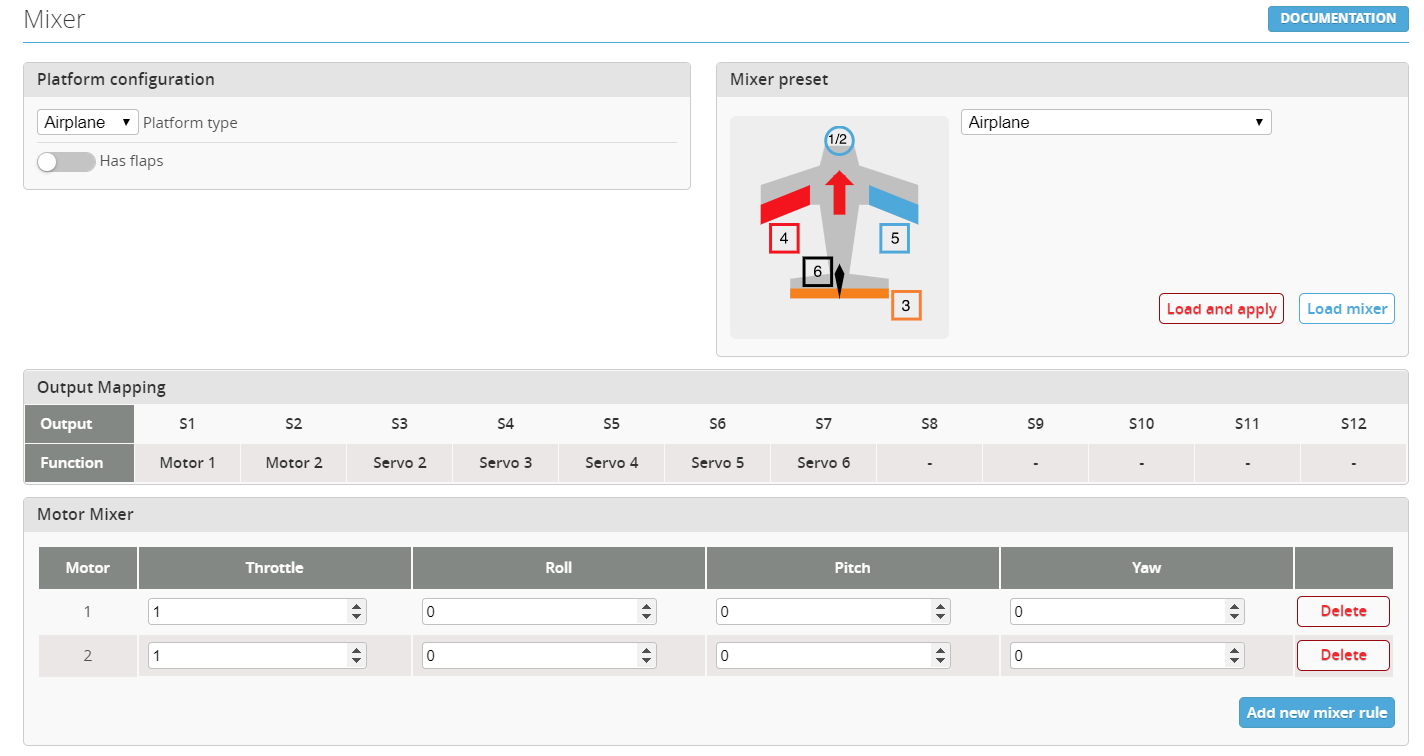
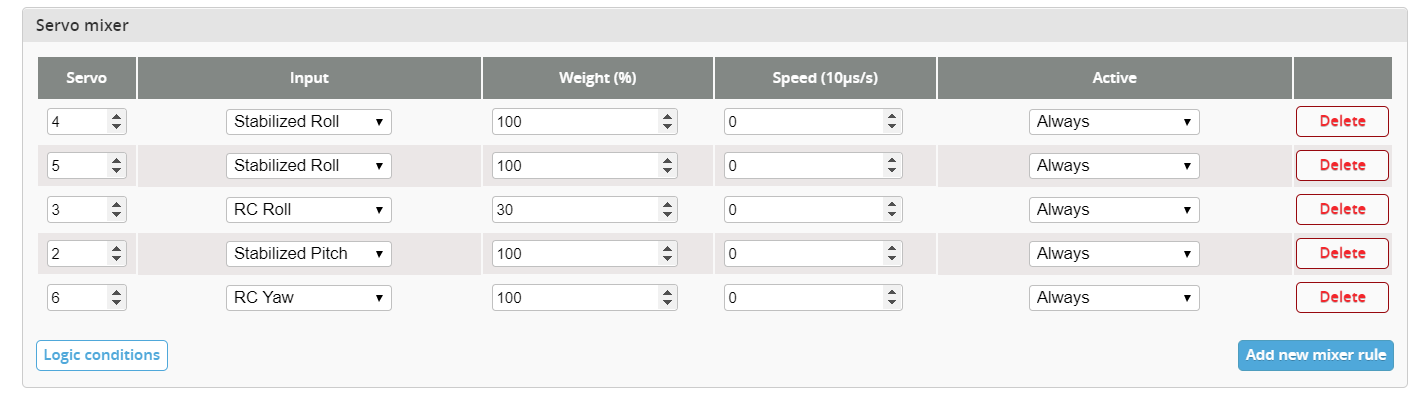
Mixer
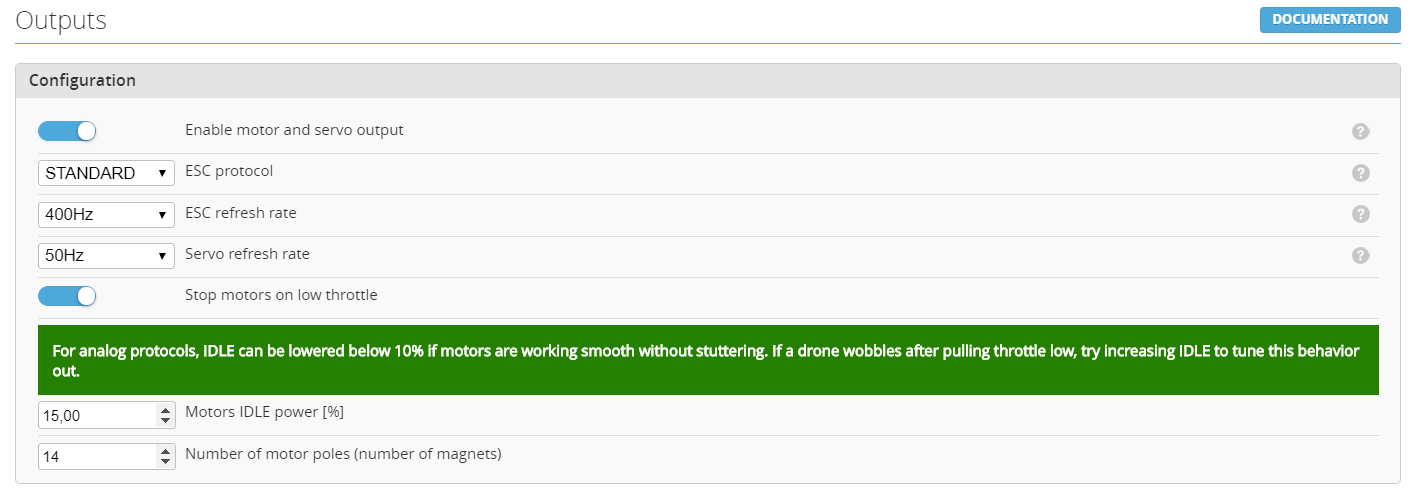
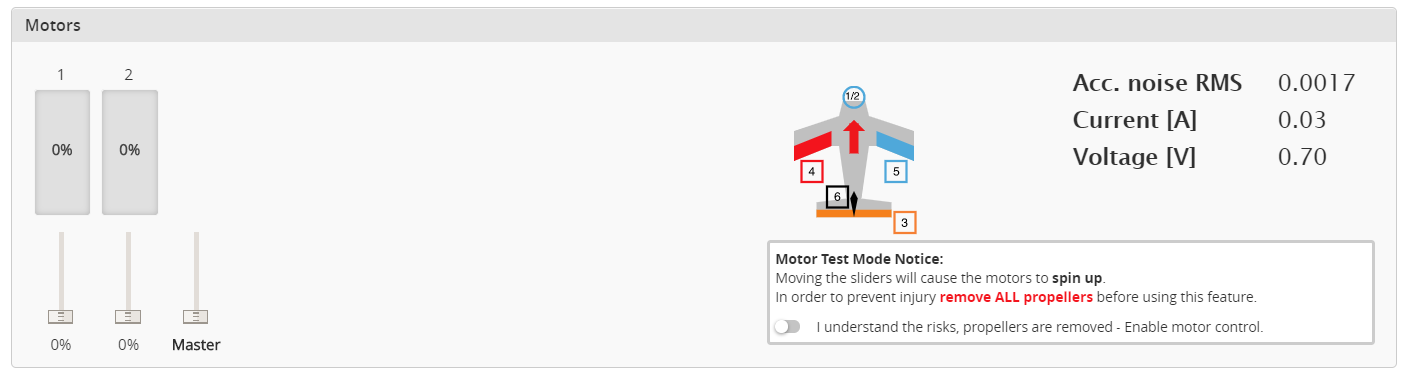
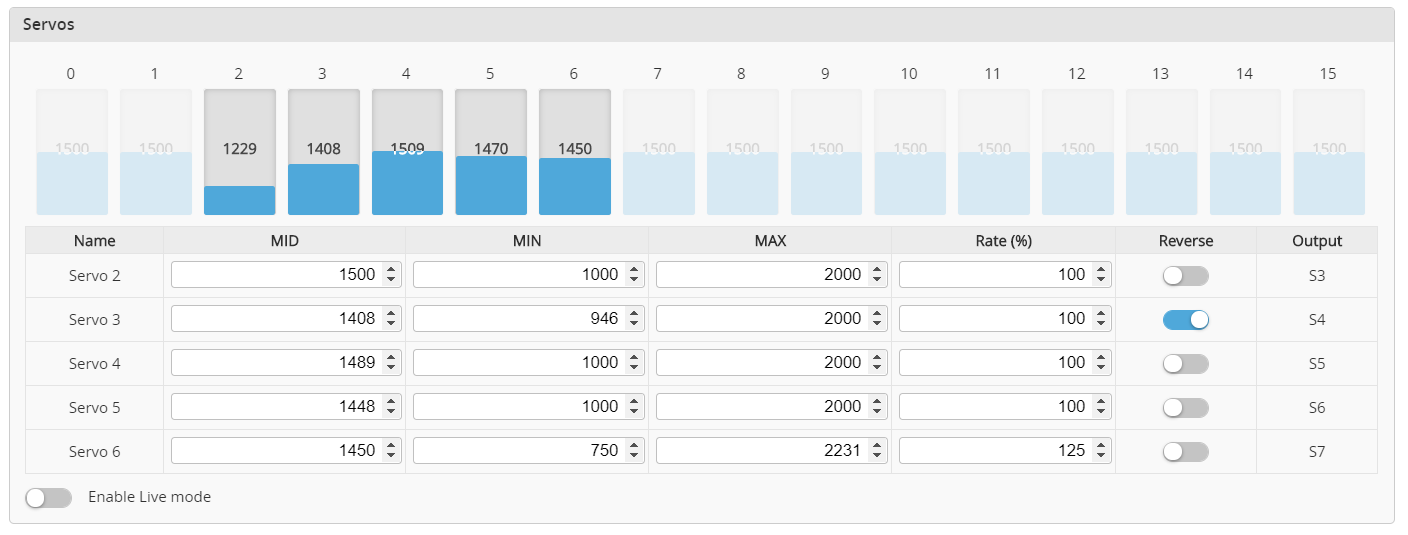
Outputs
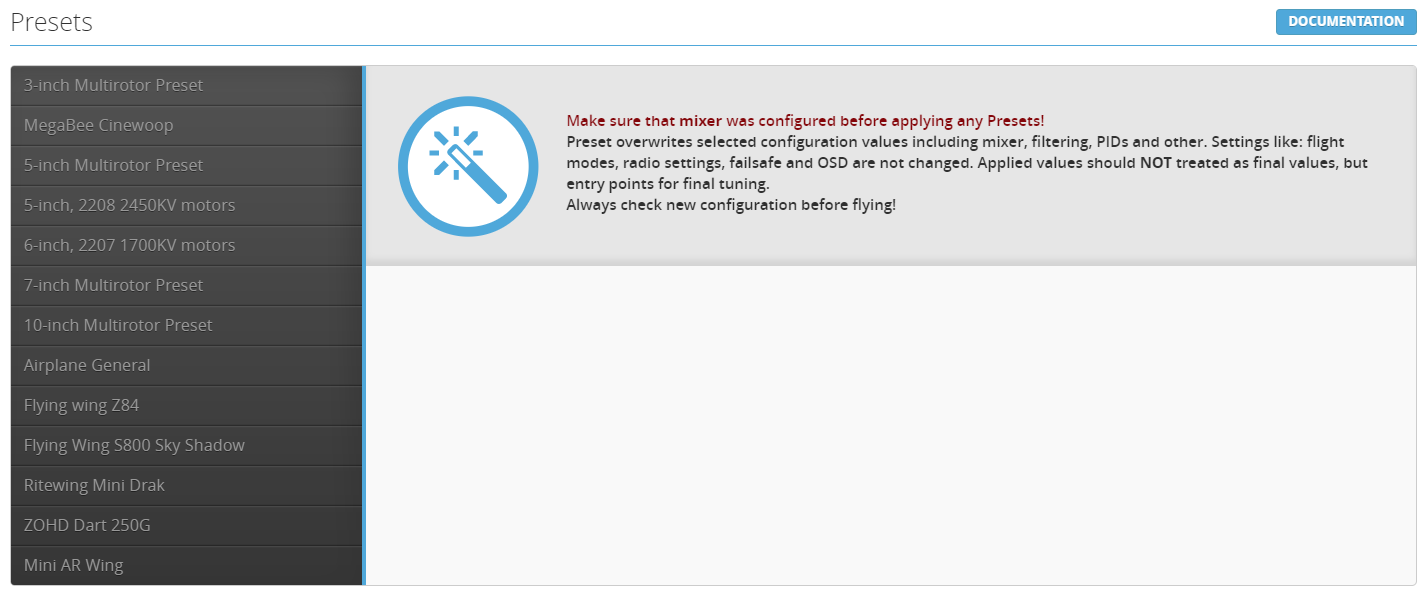
Presets
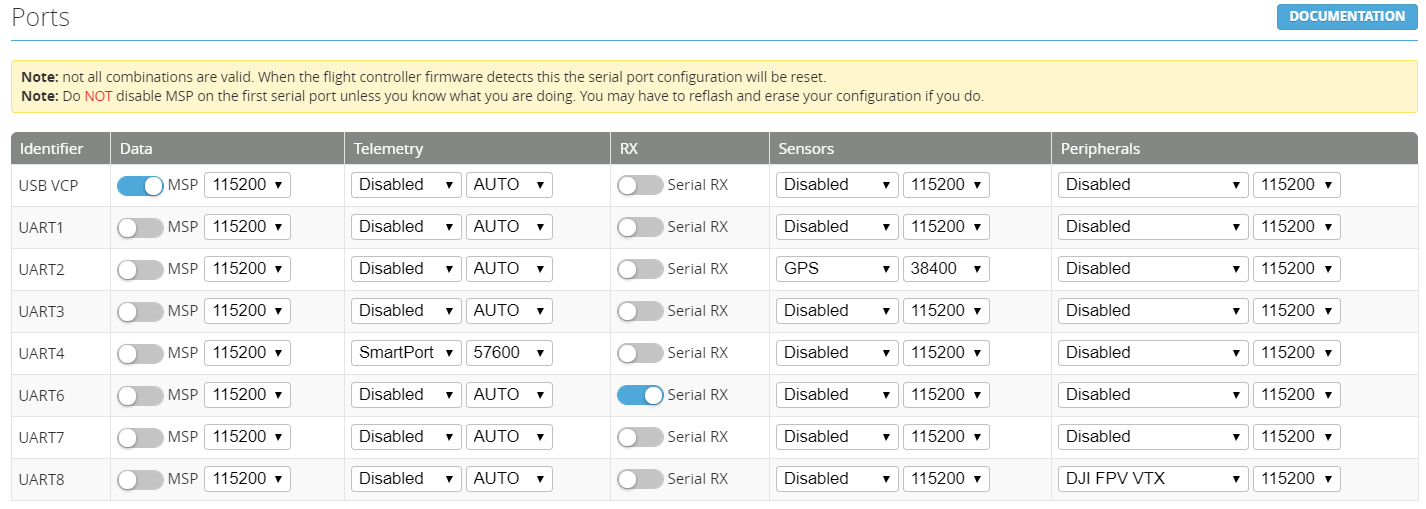
Ports
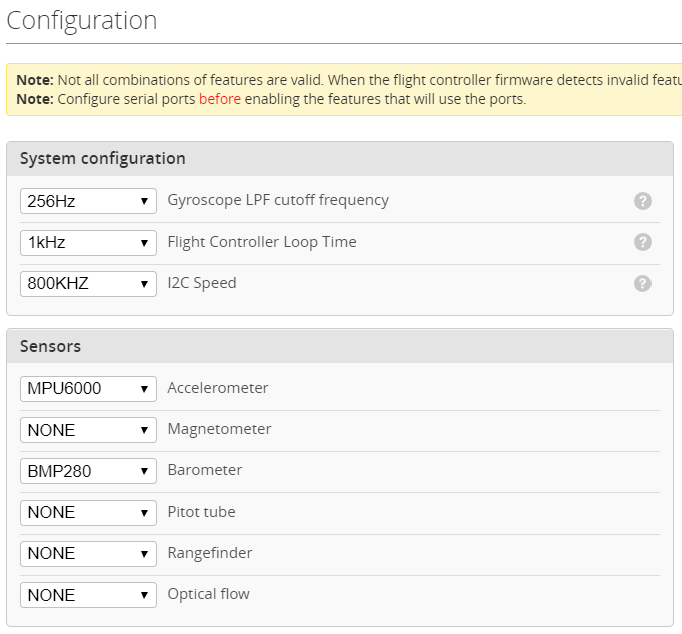
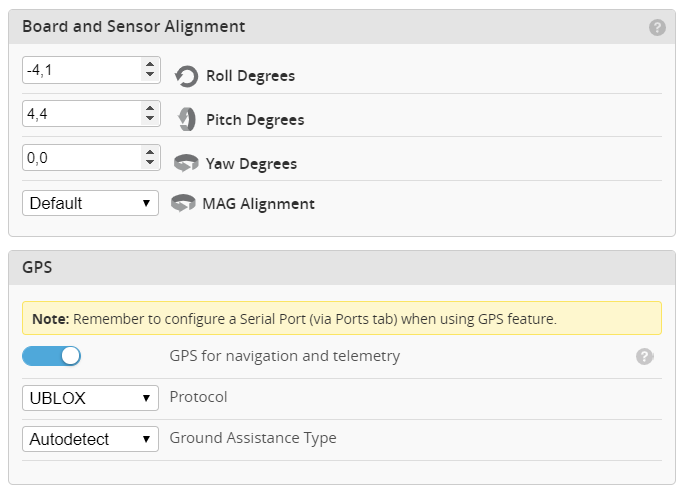
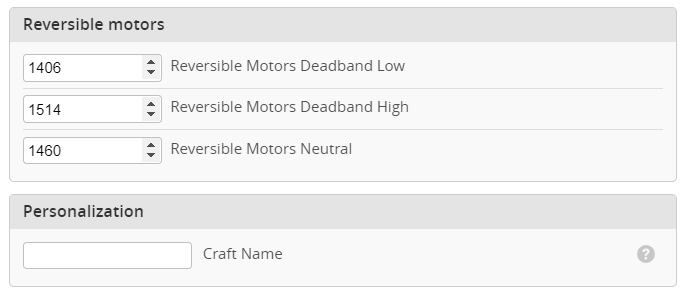
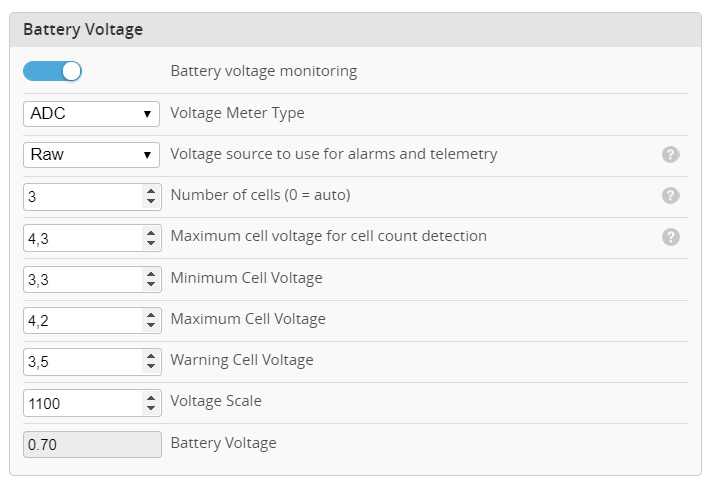
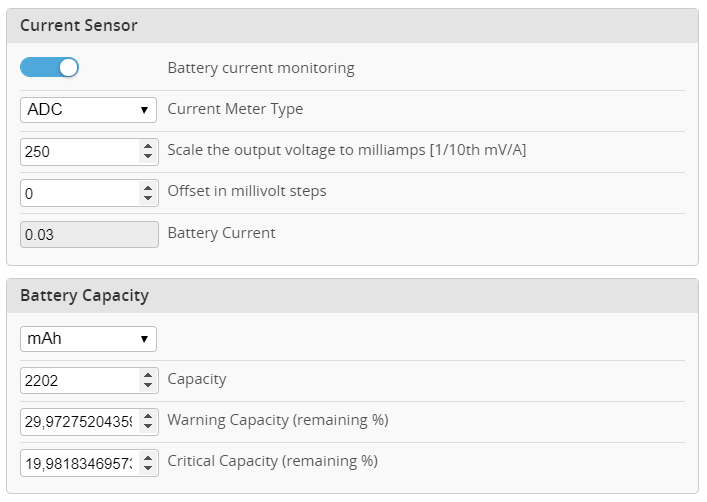
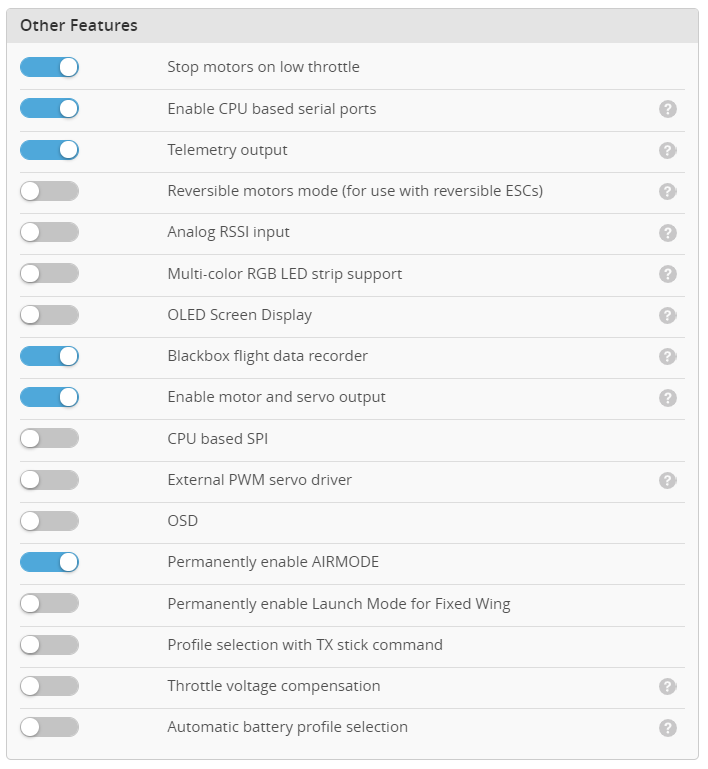
Configuration
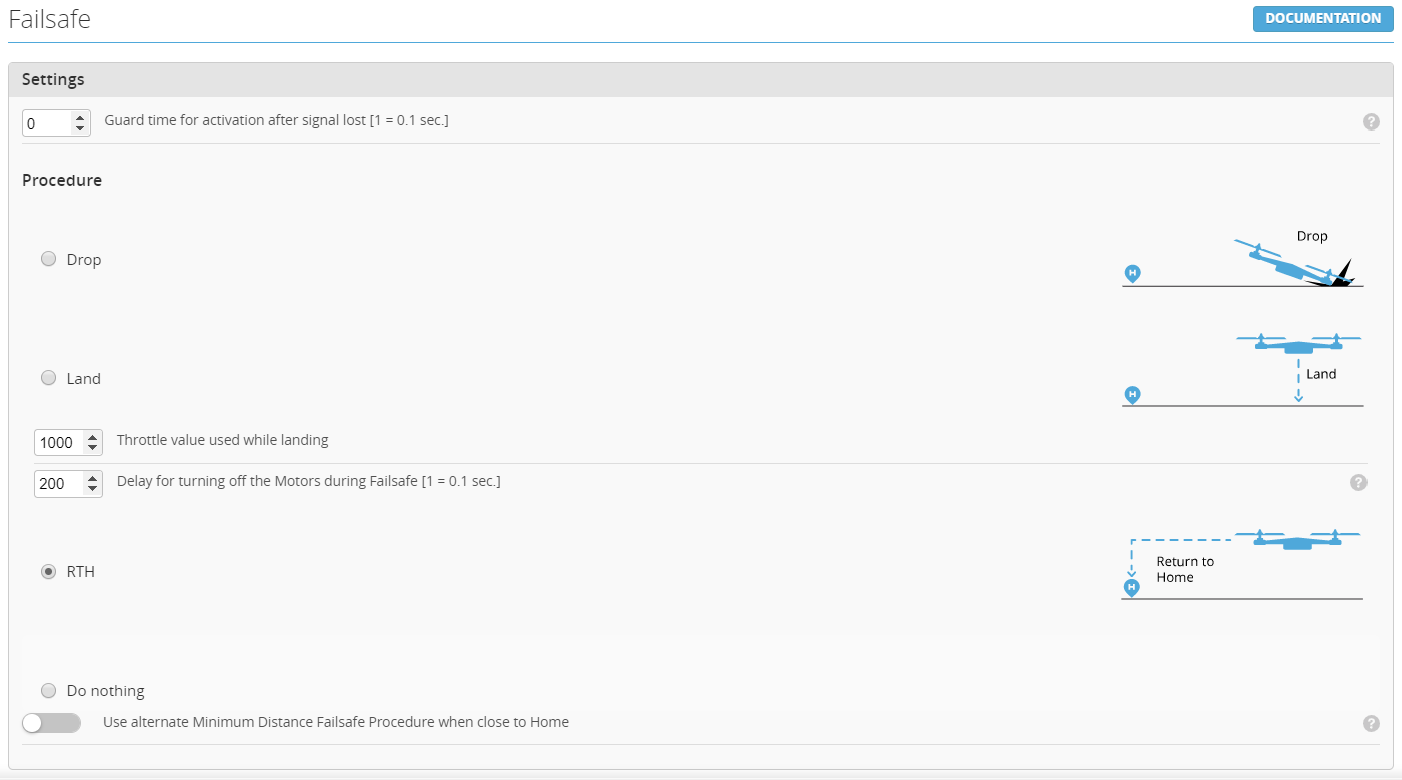
Failsafe
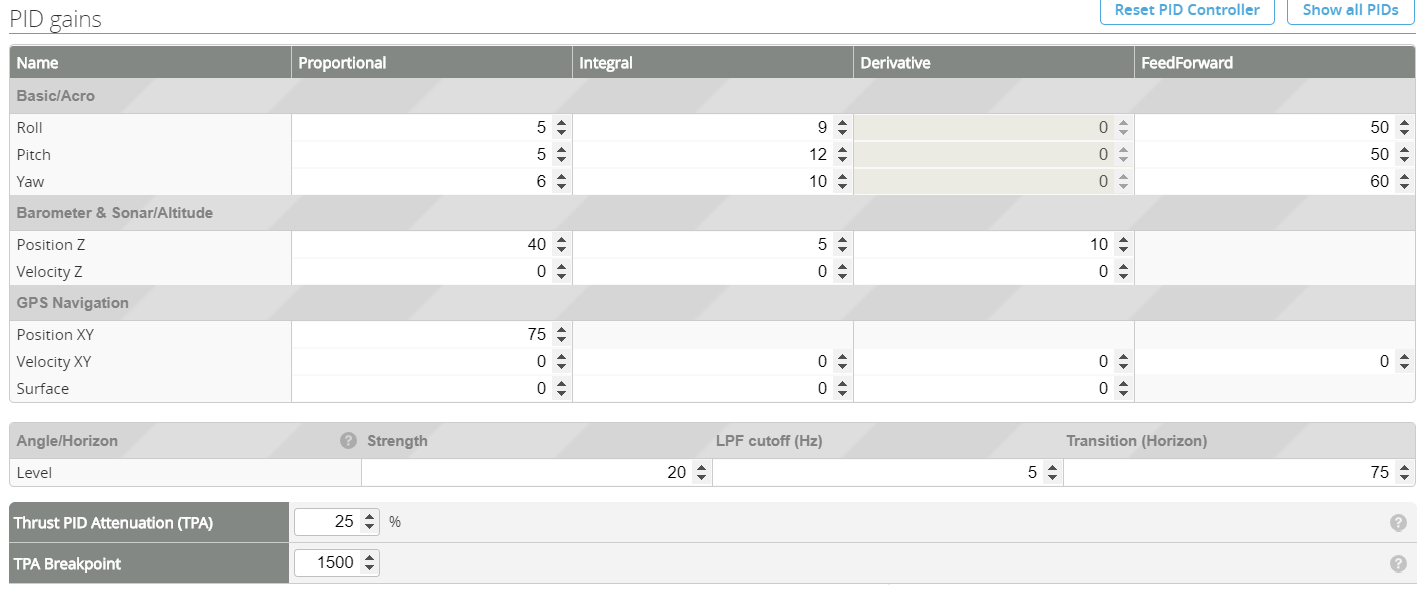
PID tuning
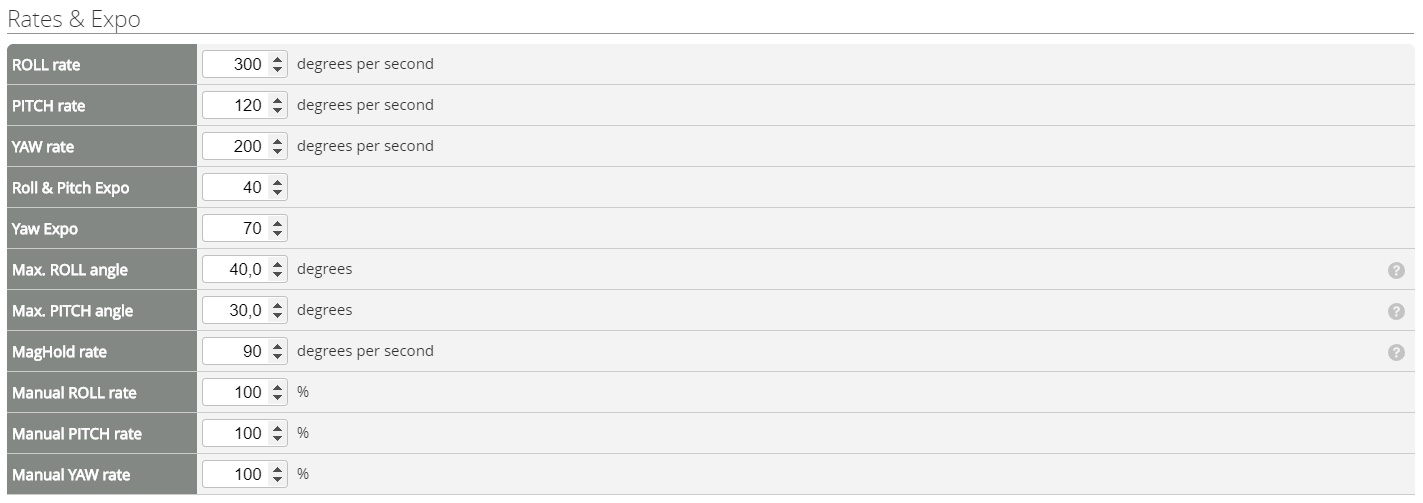
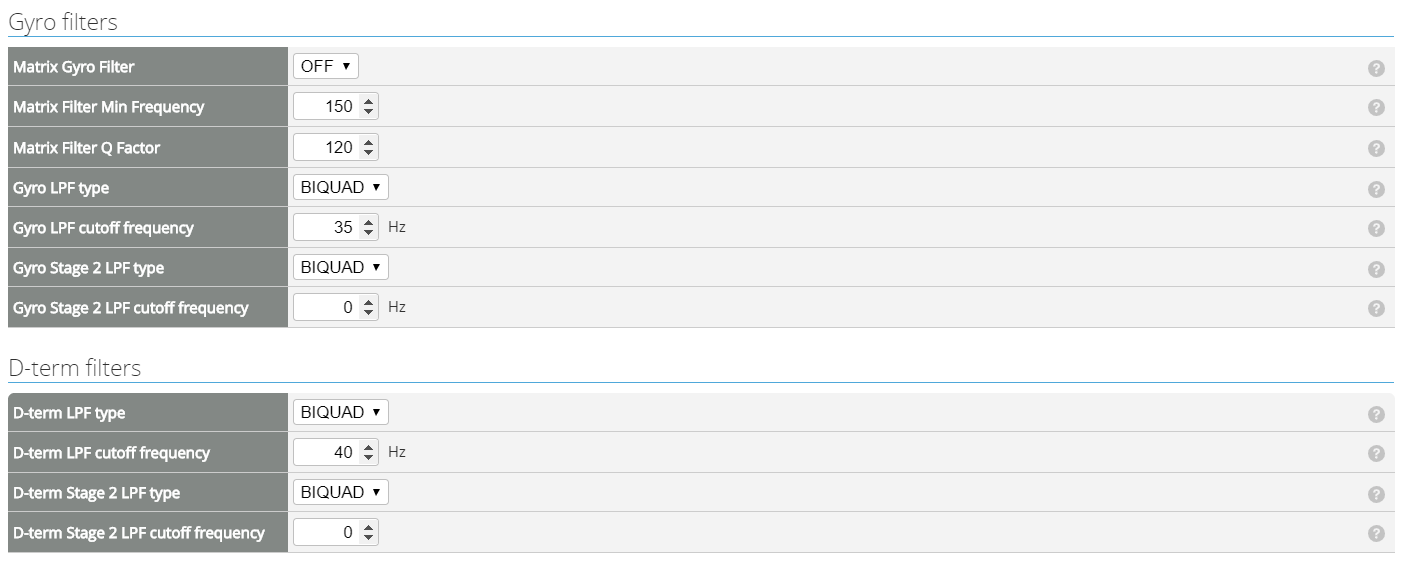
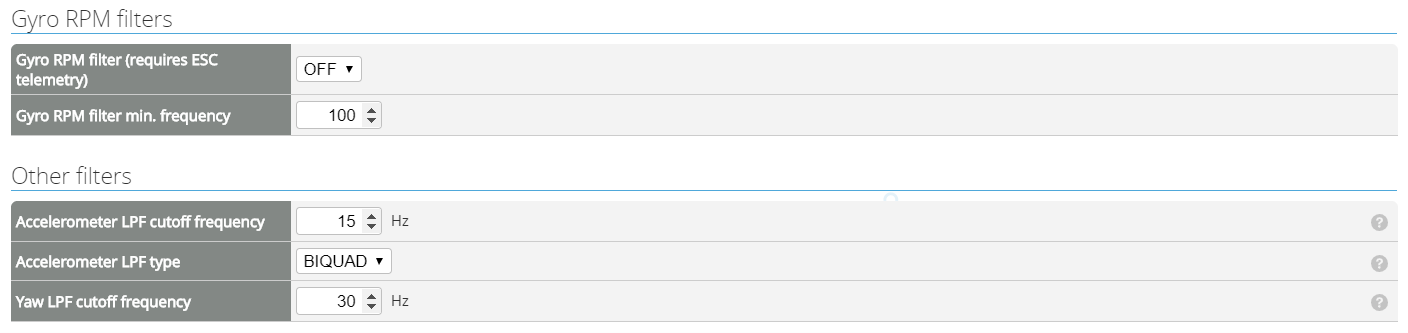
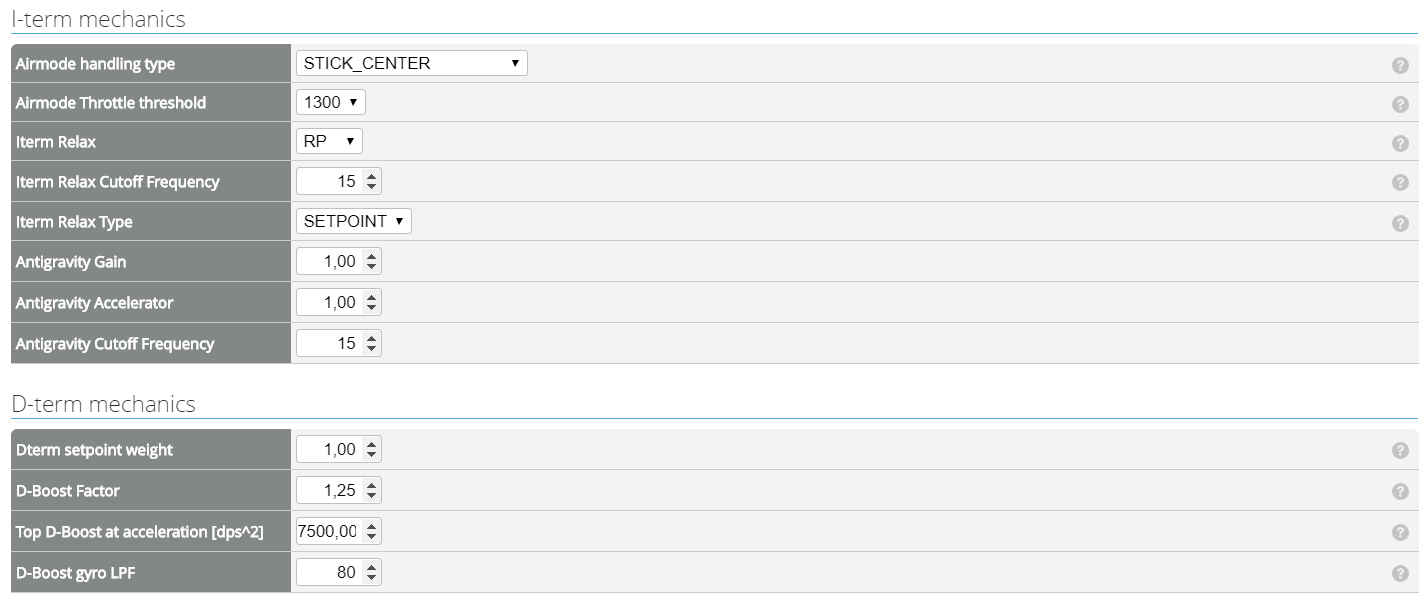
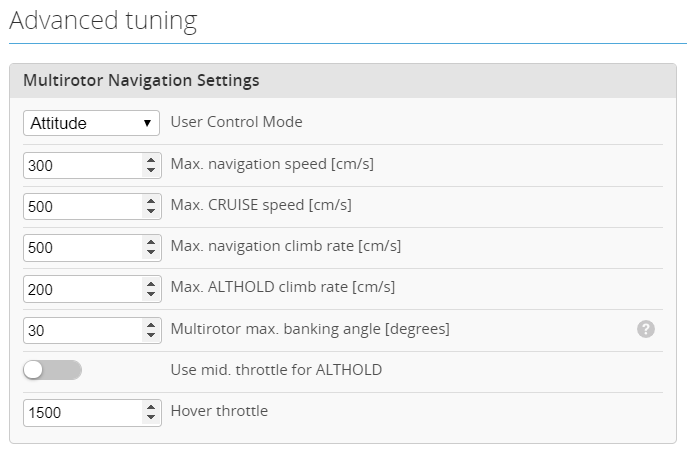
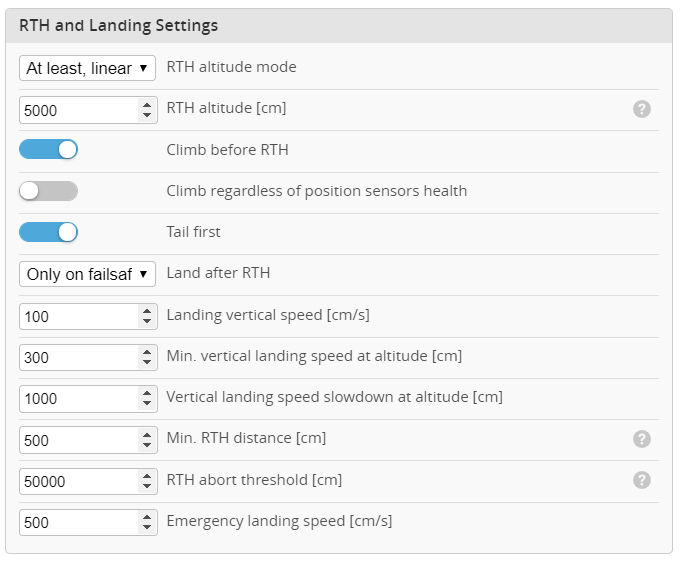
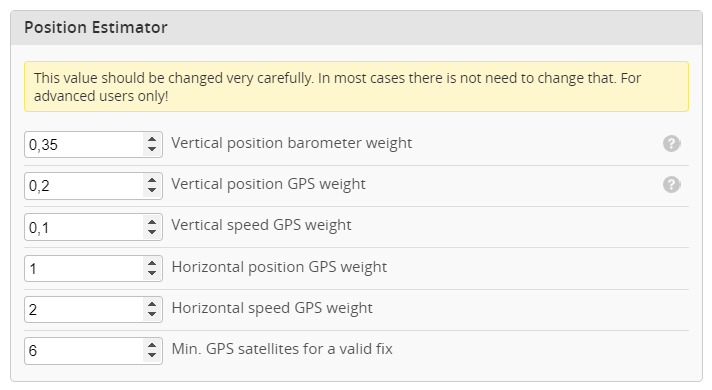
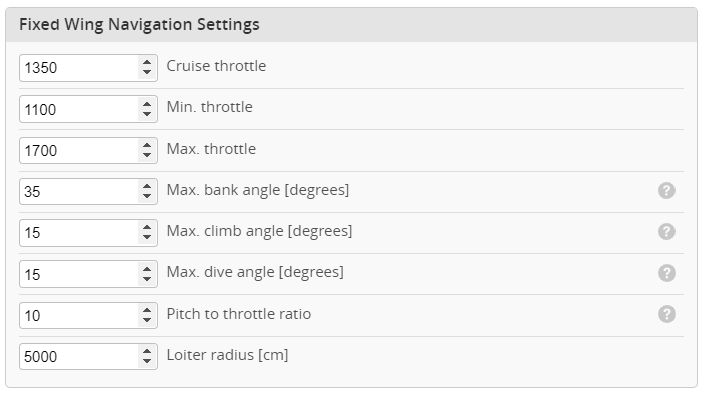
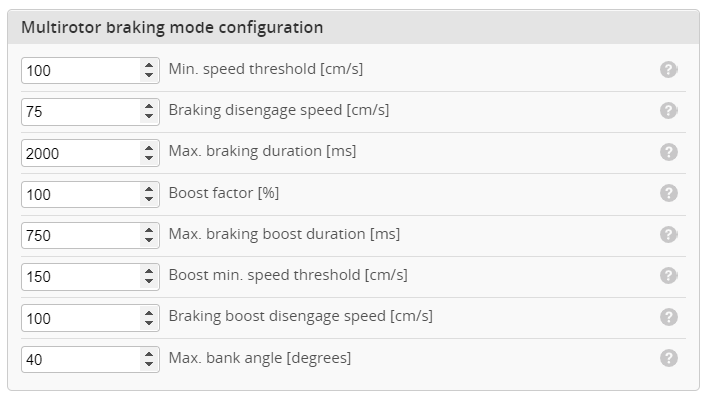
Advanced tuning
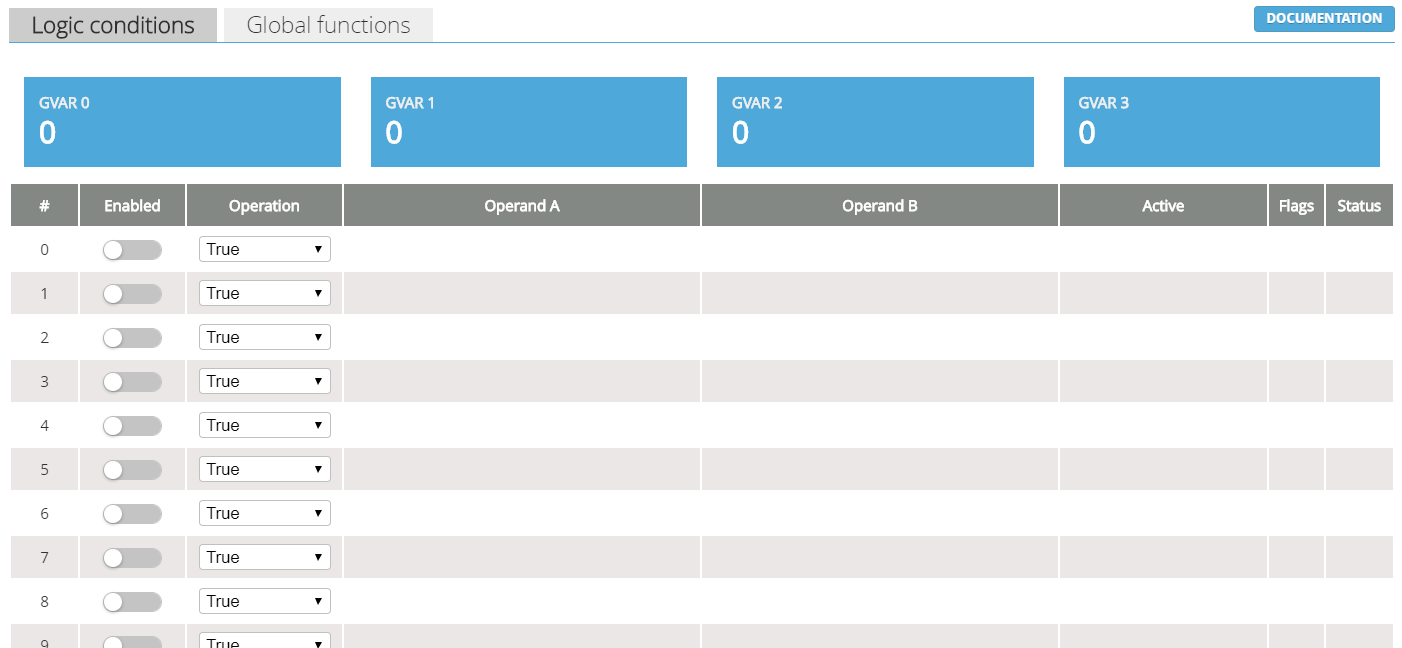
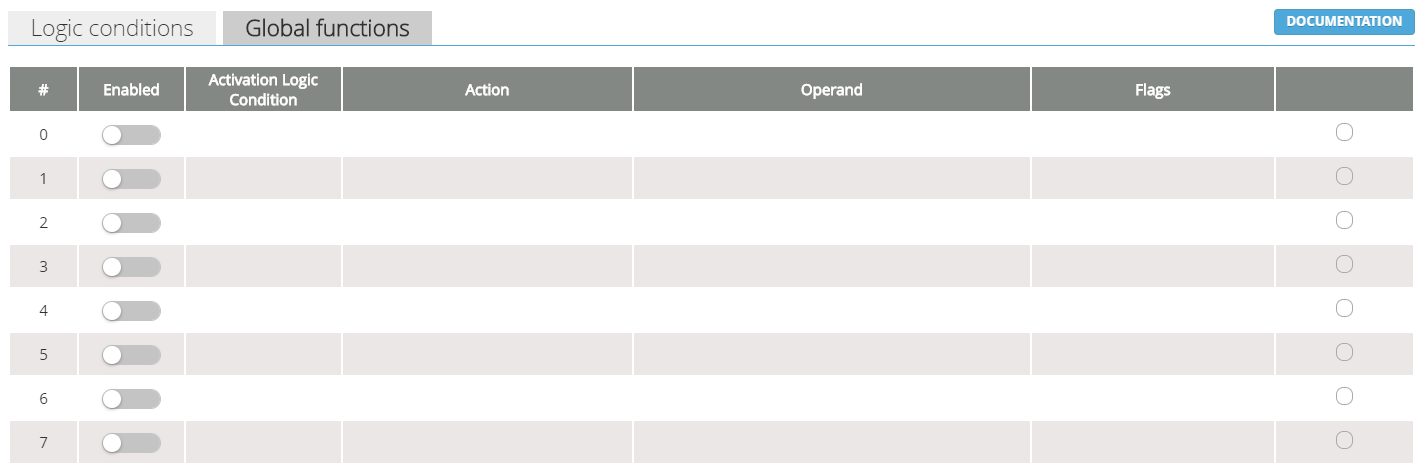
Programing
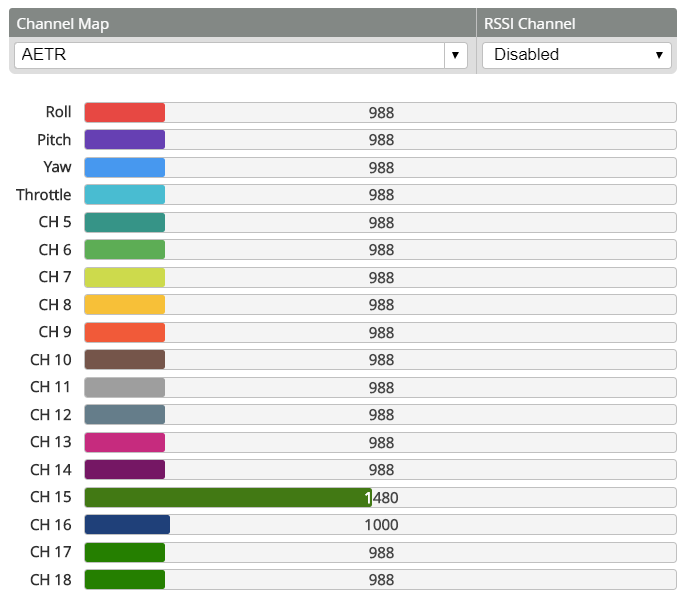
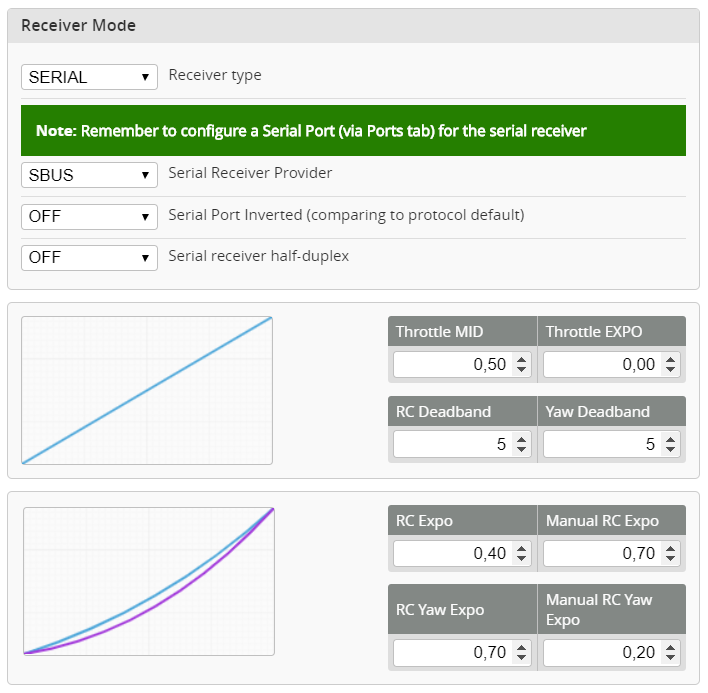
Receiver
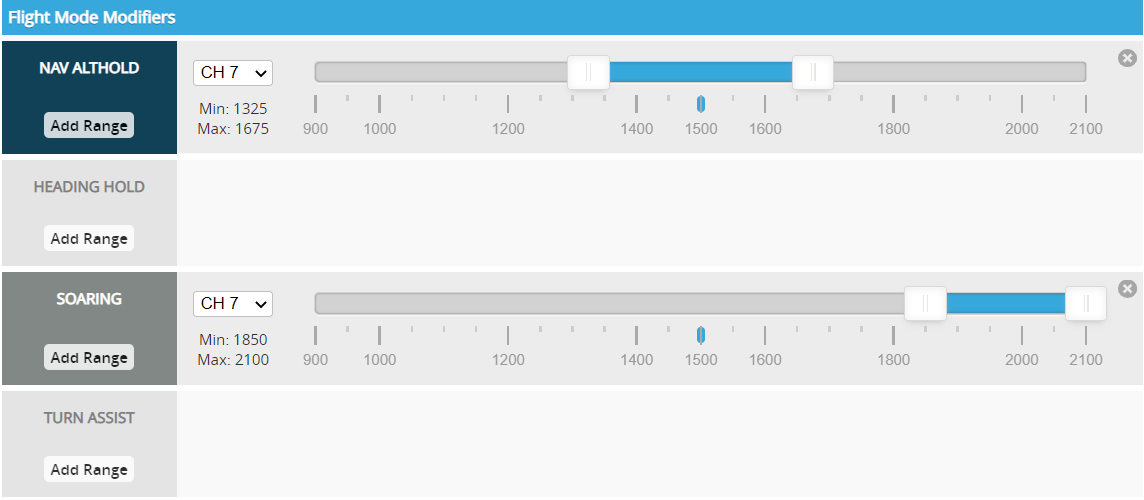
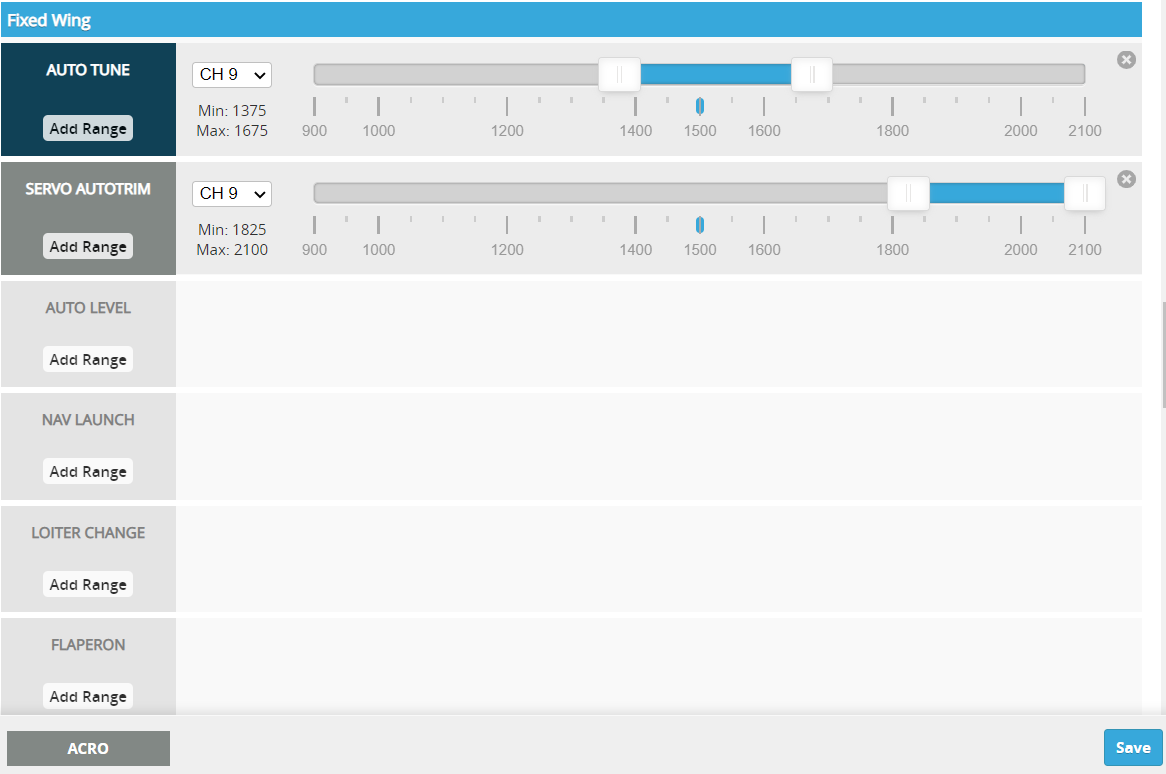
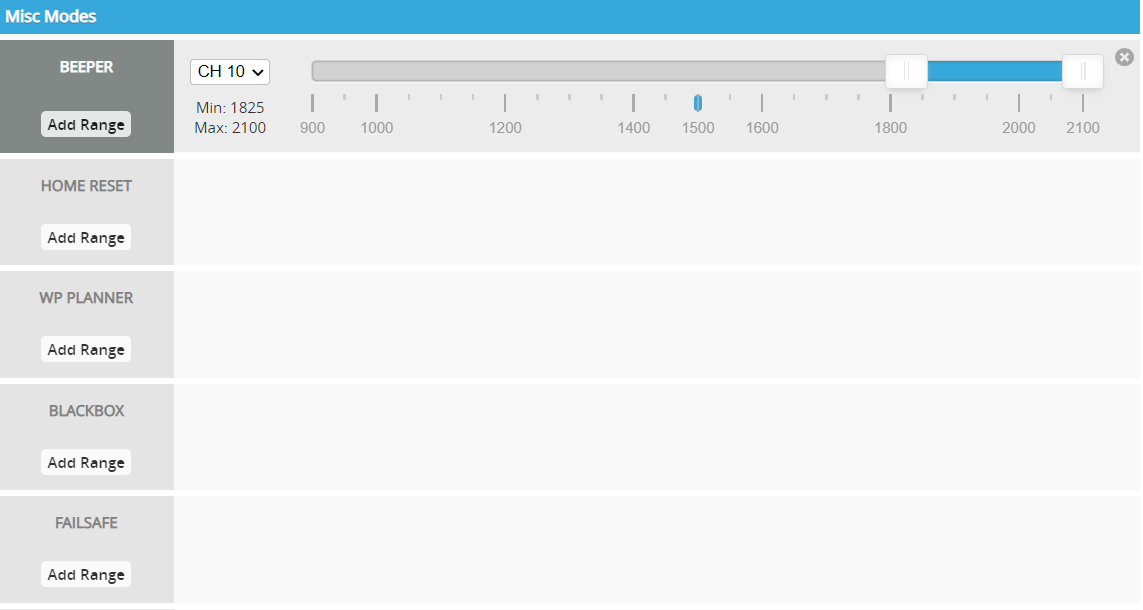
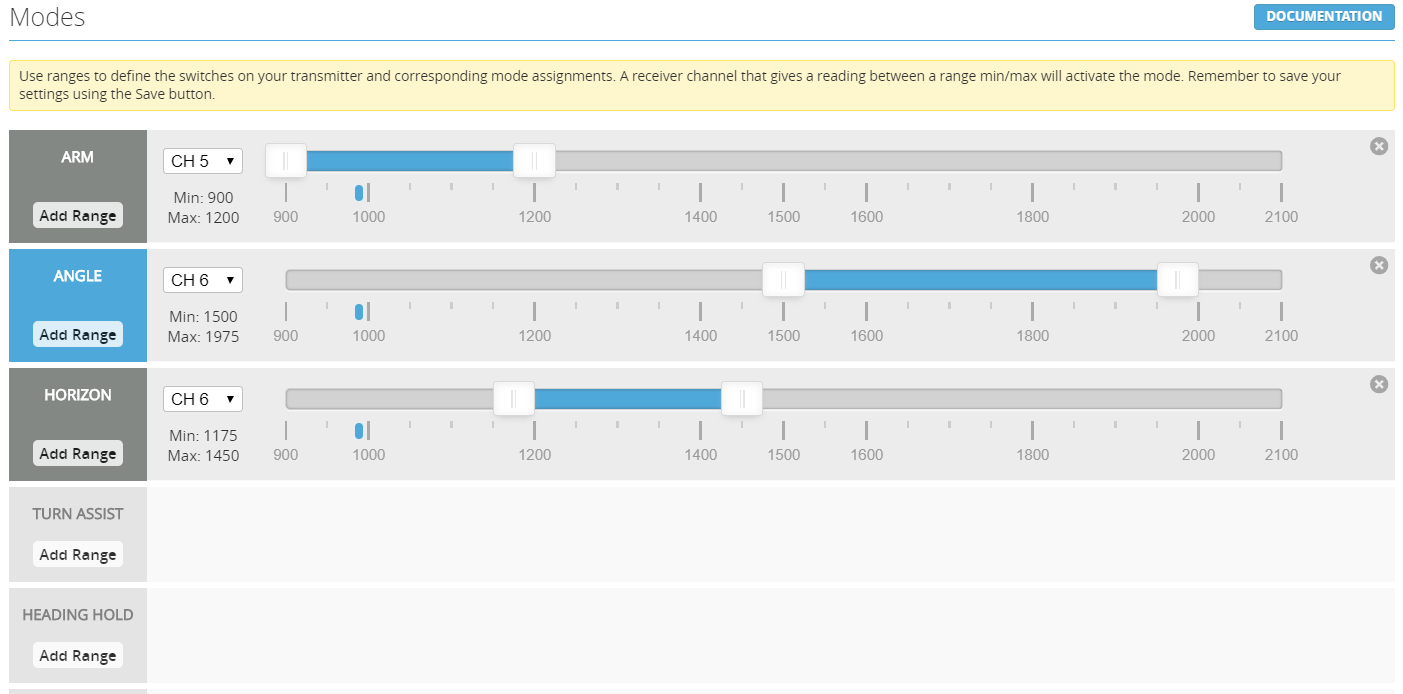
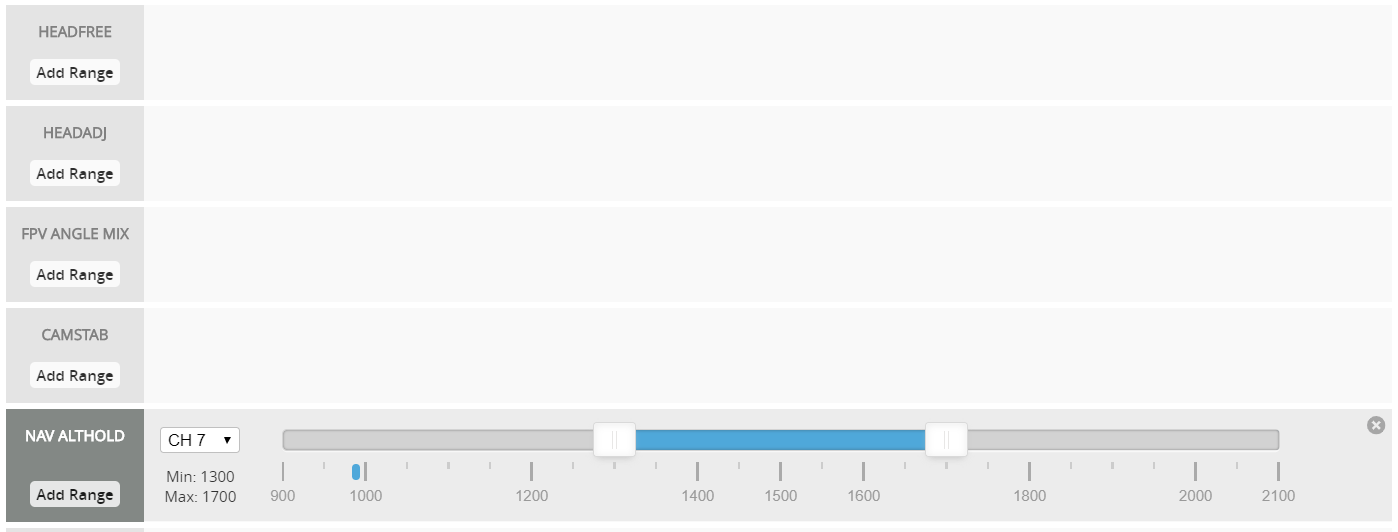
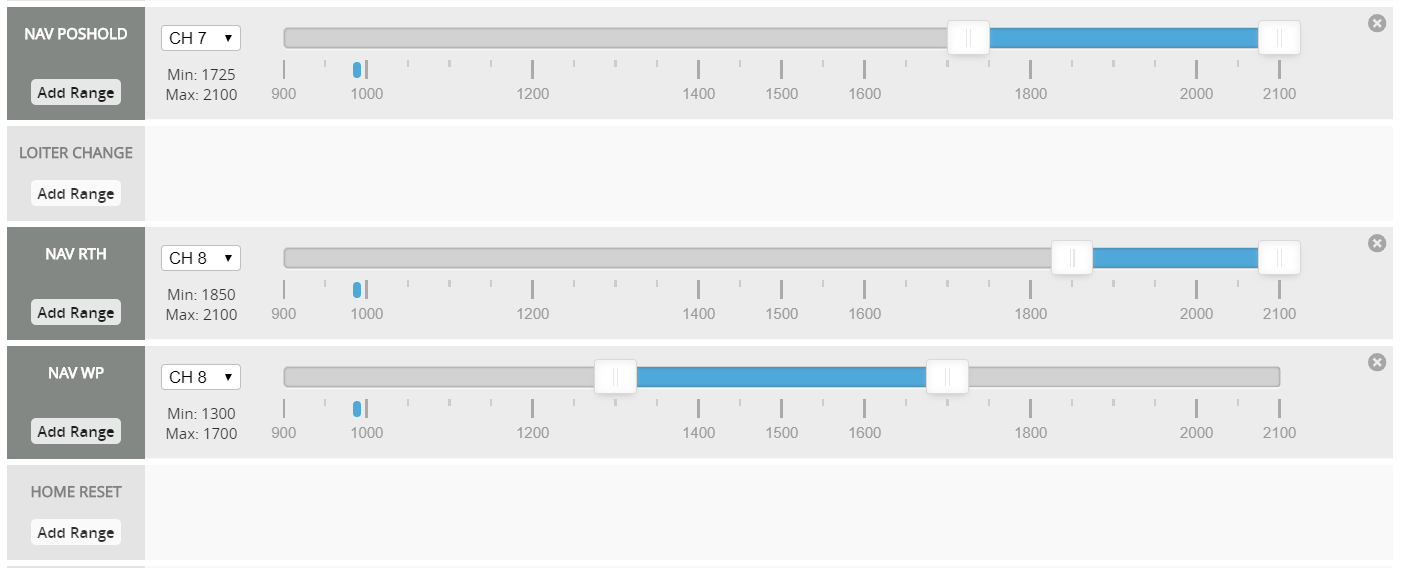
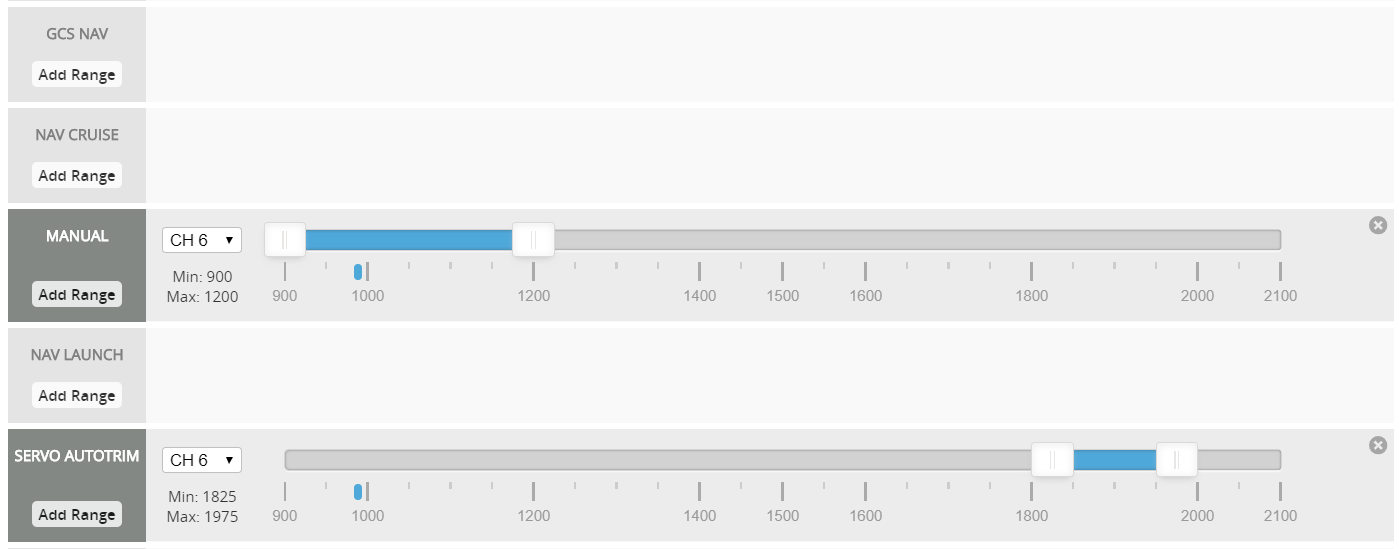
Modes
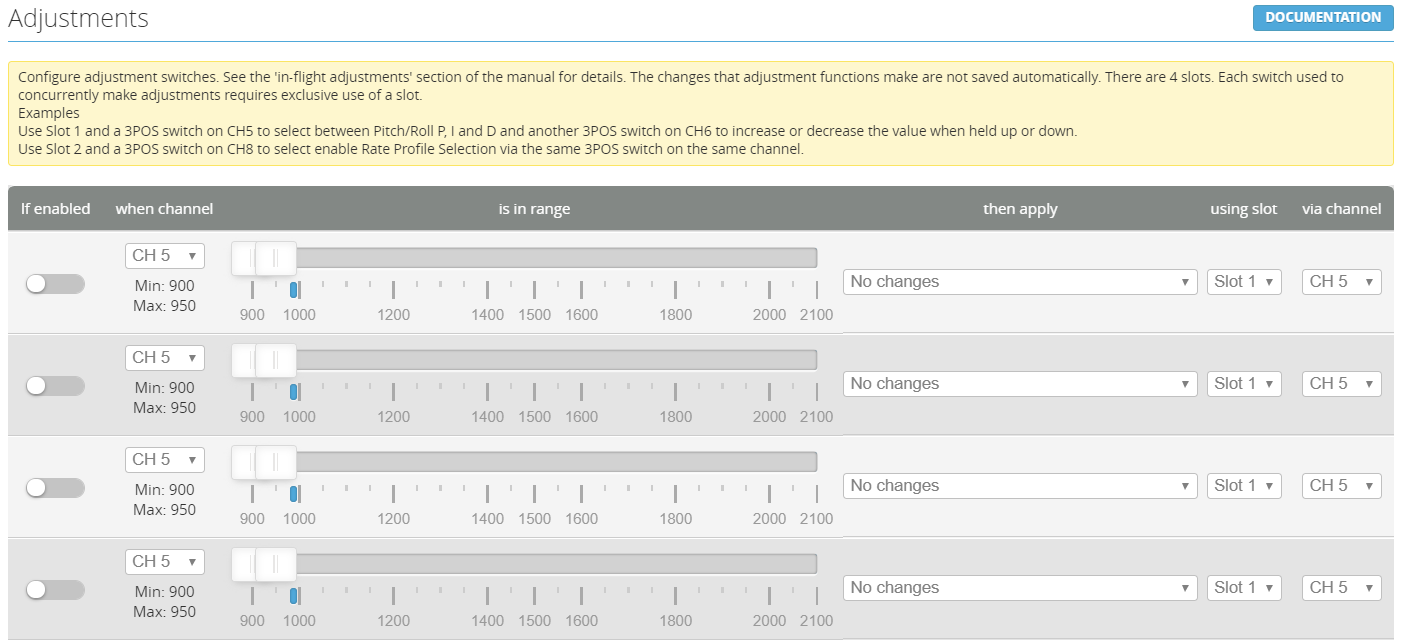
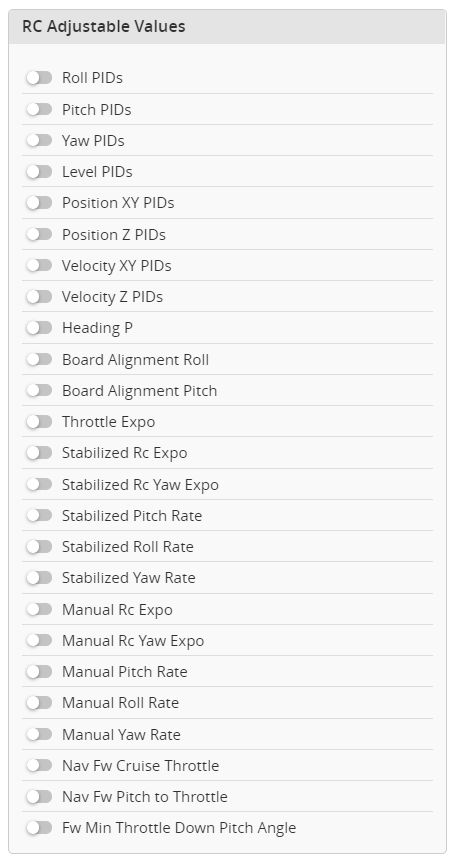
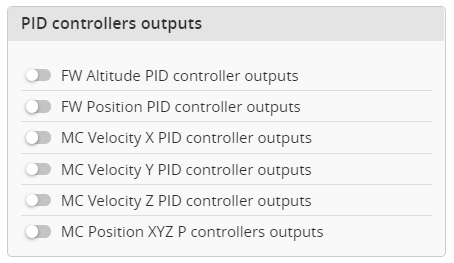
Adjustments
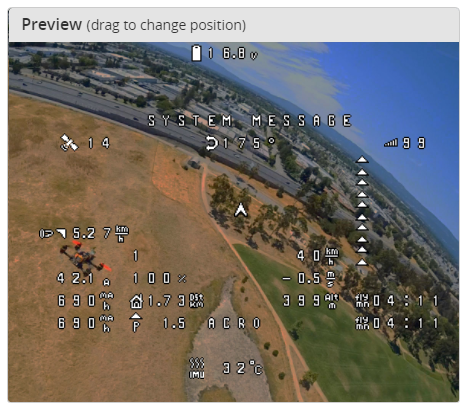
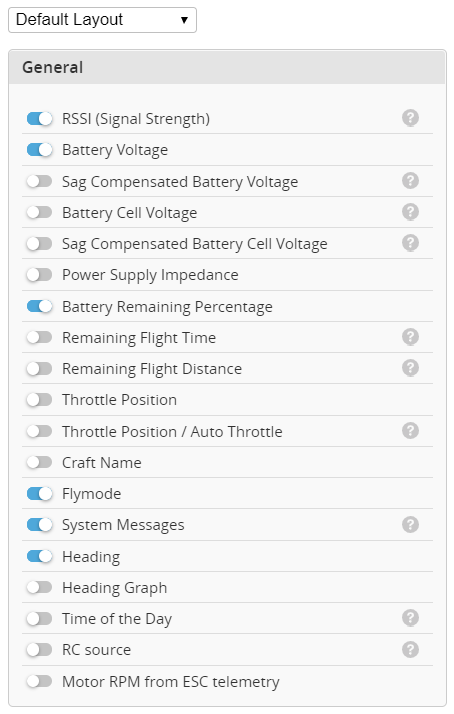
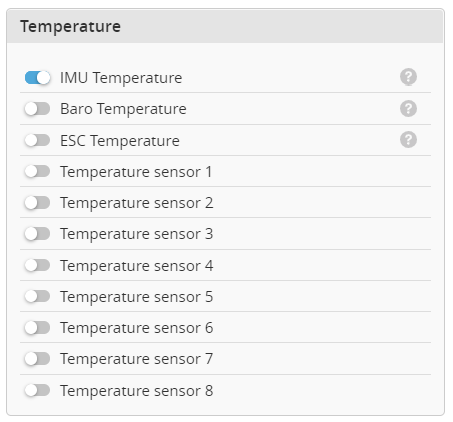
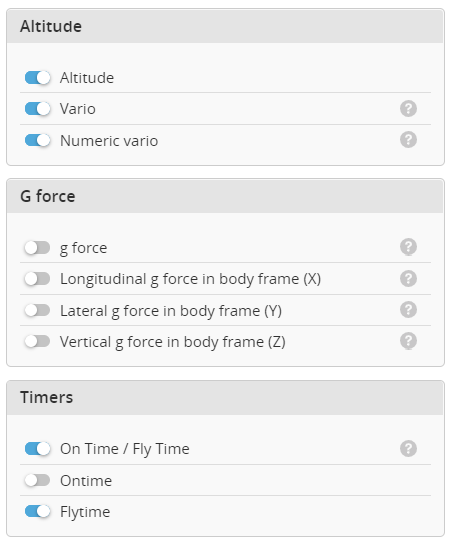
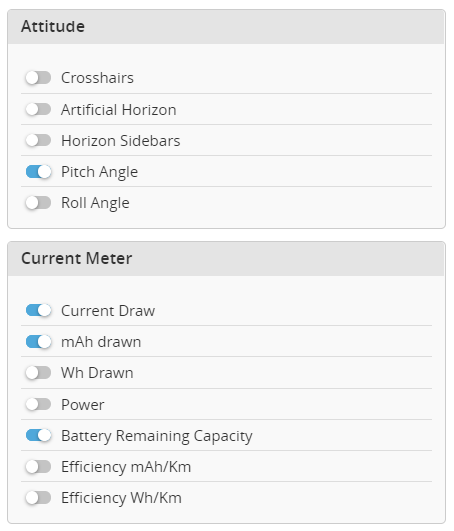
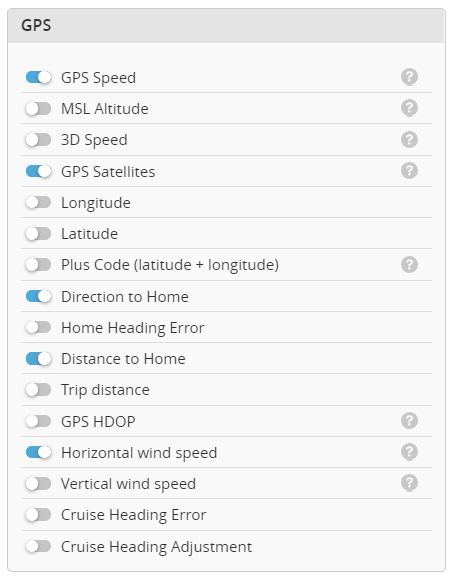
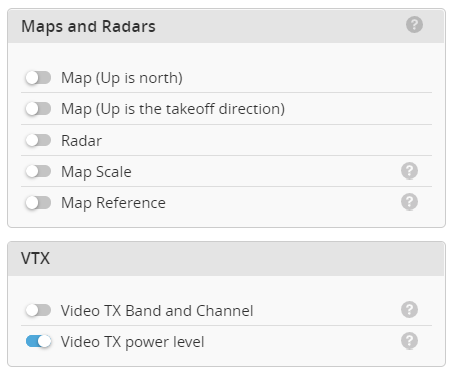
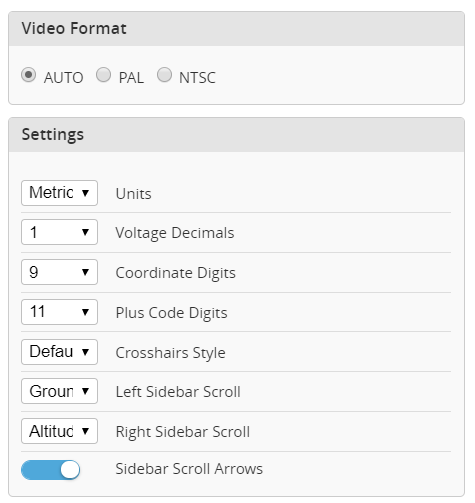
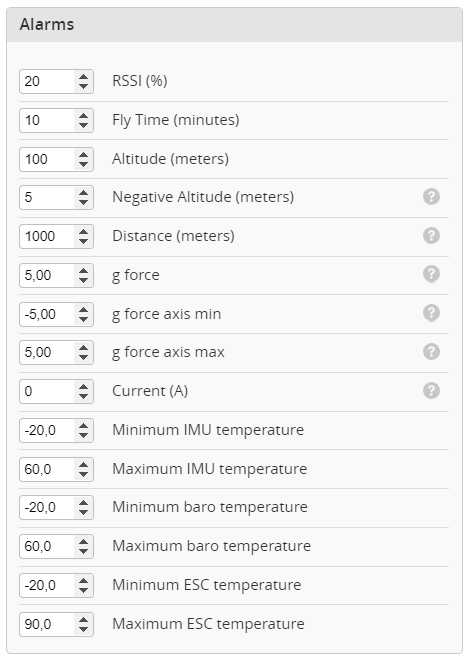
OSD
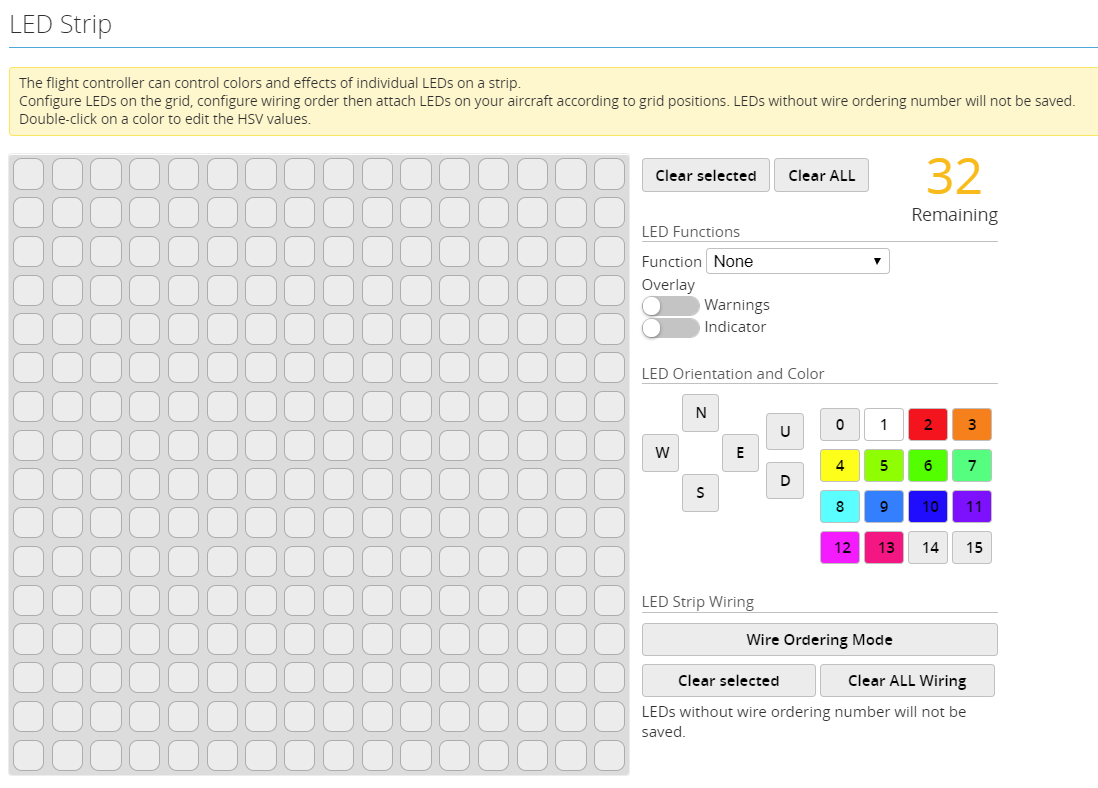
LED strip
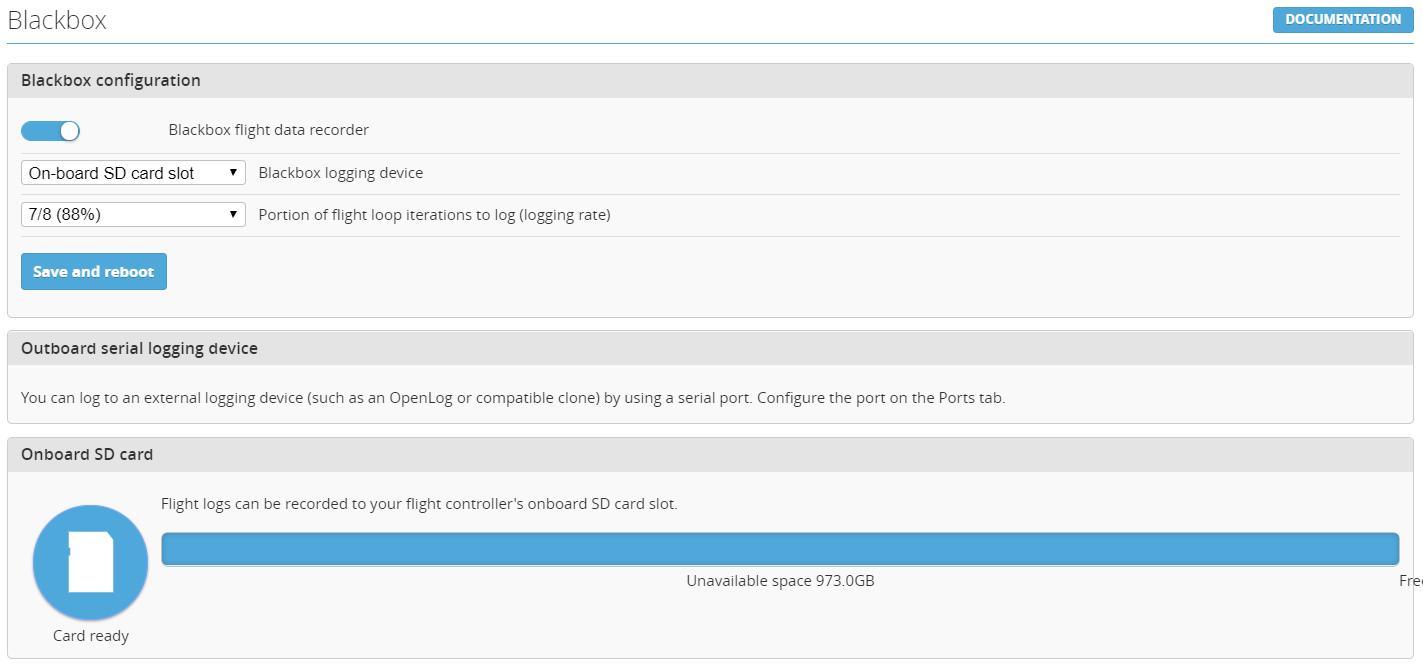
Blackbox
5.5.2021
Kopie výpisu z okna CLI na příkaz diff, který vypíše všechna nastavení rozdílná od default nastavení.
# diff
# version
# INAV/MATEKF765 2.5.2 Aug 4 2020 / 10:30:32 (faaedc7cb)
# GCC-9.2.1 20191025 (release) [ARM/arm-9-branch revision 277599]
# start the command batch
batch start
# resources
# mixer
mmix reset
mmix 0 1.000 0.000 0.000 0.000
mmix 1 1.000 0.000 0.000 0.000
# servo mix
smix reset
smix 0 4 0 100 0 -1
smix 1 5 0 100 0 -1
smix 2 3 4 30 0 -1
smix 3 2 1 100 0 -1
smix 4 6 6 100 0 -1
# servo
servo 3 946 2000 1408 -100
servo 4 1000 2000 1489 100
servo 5 1000 2000 1448 100
servo 6 750 2231 1450 125
# logic
# gvar
# gf
# feature
feature -TX_PROF_SEL
feature -OSD
feature MOTOR_STOP
feature SOFTSERIAL
feature GPS
feature PWM_OUTPUT_ENABLE
# beeper
# map
# serial
serial 0 0 115200 115200 0 115200
serial 1 2 115200 38400 0 115200
serial 3 32 115200 115200 57600 115200
serial 7 2097152 115200 115200 0 115200
# led
# color
# mode_color
# aux
aux 0 0 0 900 1200
aux 1 1 1 1500 1975
aux 2 2 1 1175 1450
aux 3 3 2 1300 1700
aux 4 11 2 1725 2100
aux 5 10 3 1850 2100
aux 6 28 3 1300 1700
aux 7 12 1 900 1200
aux 8 37 1 1825 1975
# adjrange
# rxrange
# temp_sensor
# wp
#wp 0 invalid
# osd_layout
osd_layout 0 0 25 4 V
osd_layout 0 3 8 6 H
osd_layout 0 4 8 6 H
osd_layout 0 6 23 12 V
osd_layout 0 9 1 2 H
osd_layout 0 11 3 10 V
osd_layout 0 12 2 11 V
osd_layout 0 13 18 9 V
osd_layout 0 14 3 4 V
osd_layout 0 15 18 11 V
osd_layout 0 22 15 7 V
osd_layout 0 23 8 11 V
osd_layout 0 24 13 4 V
osd_layout 0 25 23 5 V
osd_layout 0 26 18 10 V
osd_layout 0 30 2 3 V
osd_layout 0 34 11 4 H
osd_layout 0 37 2 12 V
osd_layout 0 38 8 10 V
osd_layout 0 41 8 12 V
osd_layout 0 46 2 8 V
osd_layout 0 86 12 14 V
osd_layout 0 105 8 9 V
# master
set gyro_hardware_lpf = 256HZ
set gyro_lpf_hz = 35
set acc_hardware = MPU6000
set acczero_x = 92
set acczero_y = -12
set acczero_z = -240
set accgain_x = 4060
set accgain_y = 4090
set accgain_z = 4007
set mag_hardware = NONE
set magzero_x = -135
set magzero_y = -81
set magzero_z = 240
set align_mag_roll = 300
set align_mag_pitch = 1800
set align_mag_yaw = 900
set baro_hardware = BMP280
set pitot_hardware = NONE
set blackbox_rate_num = 7
set blackbox_rate_denom = 8
set failsafe_delay = 0
set failsafe_procedure = RTH
set align_board_roll = -41
set align_board_pitch = 44
set platform_type = AIRPLANE
set model_preview_type = 14
set small_angle = 180
set applied_defaults = 3
set gps_sbas_mode = AUTO
set nav_wp_radius = 3000
set nav_landing_speed = 100
set nav_land_slowdown_minalt = 300
set nav_land_slowdown_maxalt = 1000
set nav_rth_tail_first = ON
set nav_rth_allow_landing = FS_ONLY
set nav_rth_alt_mode = AT_LEAST_LINEAR_DESCENT
set nav_rth_altitude = 5000
set nav_rth_home_altitude = 3000
set nav_fw_cruise_thr = 1350
set nav_fw_min_thr = 1100
set nav_fw_climb_angle = 15
set nav_fw_launch_motor_delay = 200
set telemetry_switch = ON
set smartport_fuel_unit = PERCENT
set osd_left_sidebar_scroll = GROUND_SPEED
set osd_right_sidebar_scroll = ALTITUDE
set osd_sidebar_scroll_arrows = ON
set i2c_speed = 800KHZ
# profile
profile 1
set fw_i_pitch = 12
set fw_i_roll = 9
set max_angle_inclination_rll = 400
set yaw_lpf_hz = 30
set tpa_rate = 25
set rc_expo = 40
set rc_yaw_expo = 70
set roll_rate = 30
set pitch_rate = 12
# battery_profile
battery_profile 1
set bat_cells = 3
set battery_capacity = 2202
set battery_capacity_warning = 660
set battery_capacity_critical = 440
# end the command batch
batch end
25.5.2025
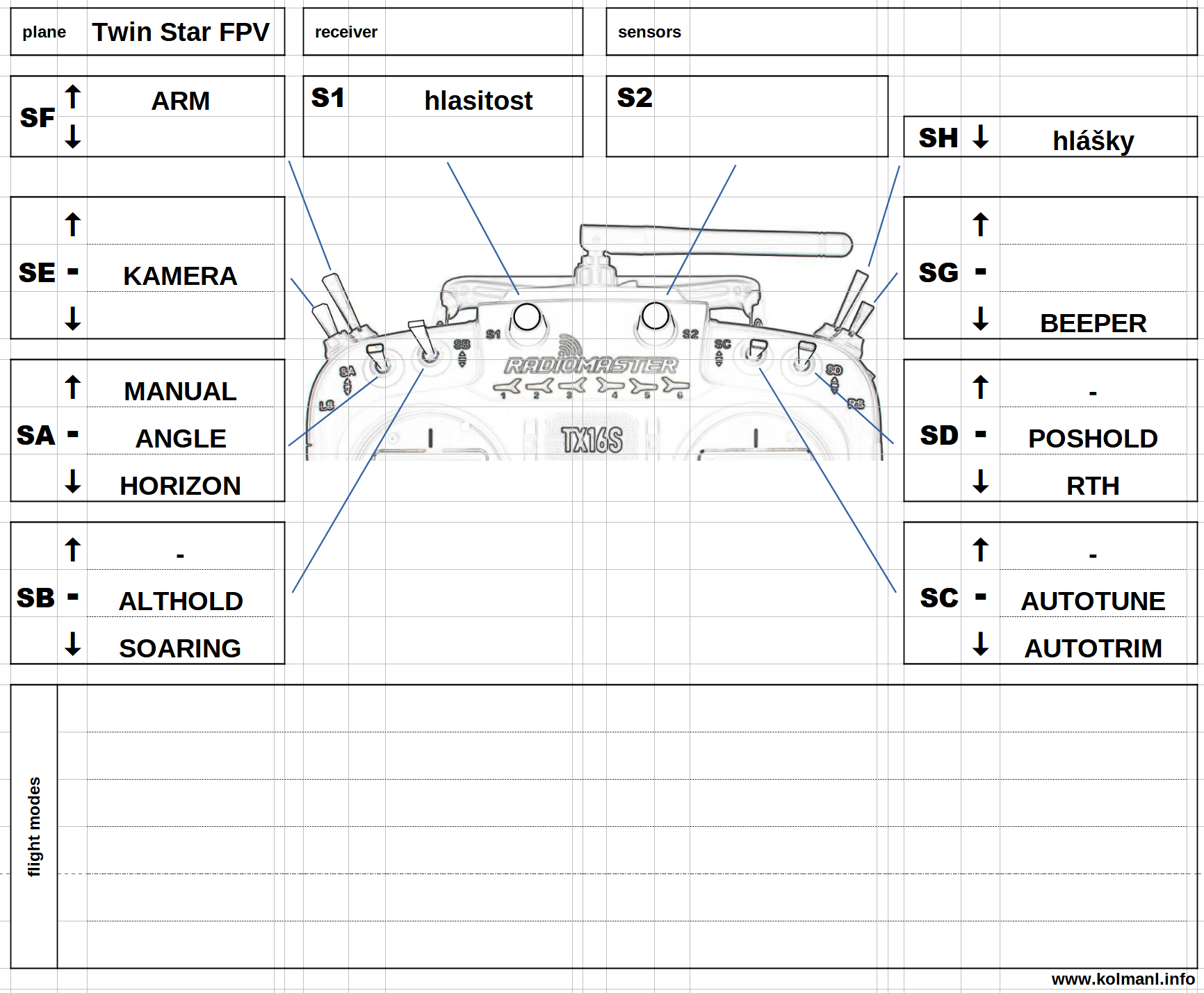
Musel jsem si opsat, jak mám letadlo nastavené: