


INAV 4.1 
Zatím, co jsem s Twin Starem spokojeně létal, systém INAV byl celkem intenzivně vyvíjen dál. Zaznamenal jsem zvýšení podpory DJI FPV, zaznamenal jsem vylepšení ladění letových vlastností systému, ale až zmínka o tom, že systém má nový letový režim GLIDER, mě přiměla k úvahám přejít na novější verzi INAVu.
Proč? Létání v automatických režimech je pro mě nebezpečné. Létám s relativně malým výkonem motorů, létám v termickém i větrném počasí, létám s malou rezervou rychlosti a tak se snadno stane, že při vlétnutí do poryvu flight kontroler ve snaze udržet výšku uvede letadlo do vývrtky. Je to poměrně často popisovaný jev a i já s tím mám zkušenost.
Režim GLIDER slibuje jiné chování. Jestli to chci vyzkoušet, musím přejít na vyšší verzi INAV, to je aktuálně verze 4.1.
Zazálohovvání aktuálního nastavení INAV příkazem diff, stažení Konfigurátoru 4.1 do PC, update firmware kontroleru verzí 4.1.
První změna, místo krabice znázorňující dron, vidím letadýlko  :
:
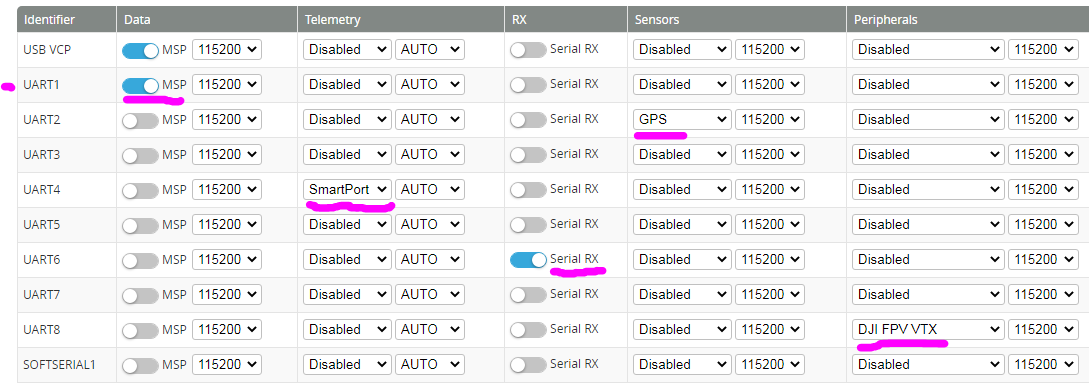
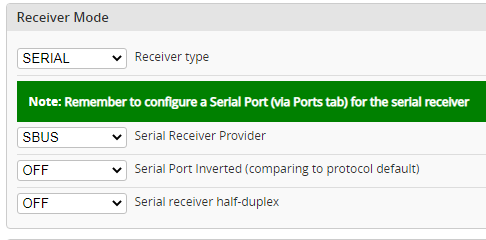
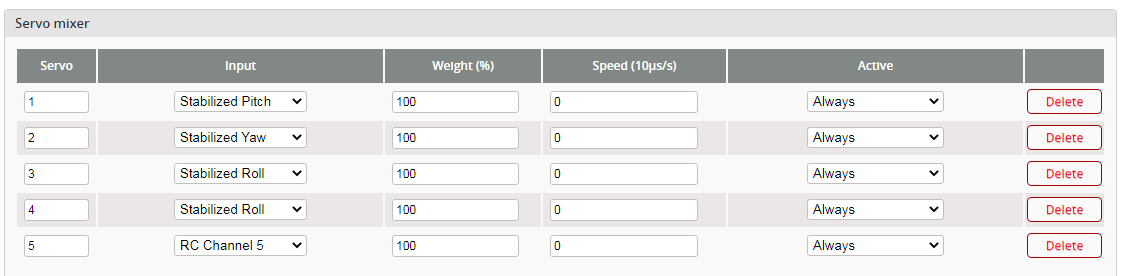
Aplikoval jsem přes CLI nastavení, která jsem si předtím ve staré verzi uložil příkazem diff. Projel jsem si a okontroloval všechny záložky konfigurátoru.
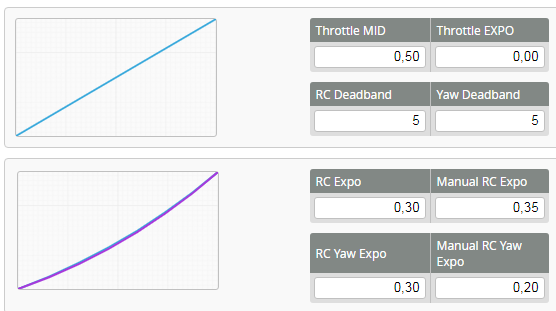
Tentokrát jsem si u křidélek nastavil diferenciaci, omezil jsem výchylku křidélek dolů:
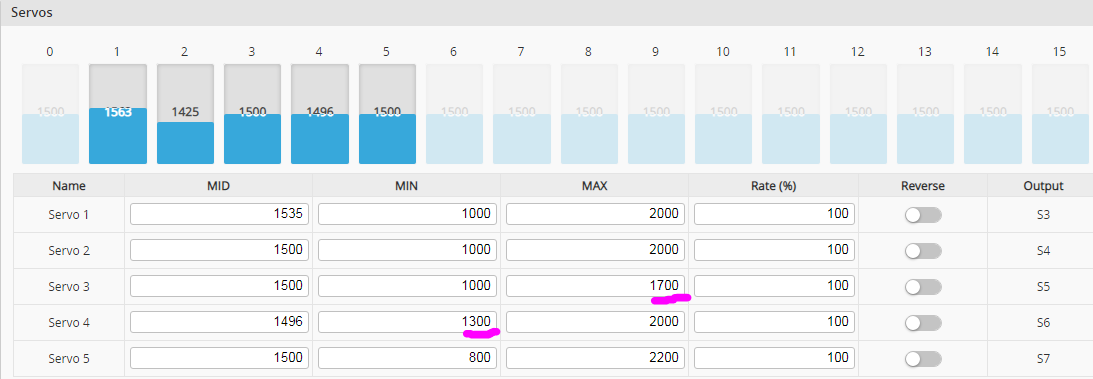
Zbývá to vyzkoušet za letu!
(zveřejněno na stránce Údržba)