


INAV 
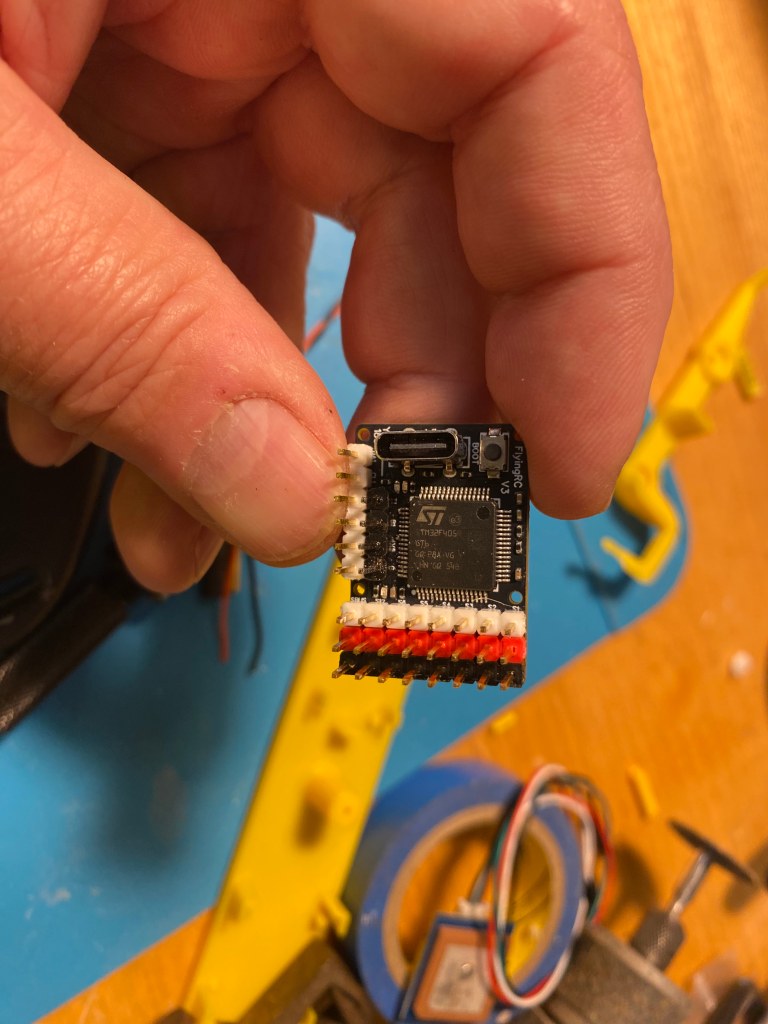
Nechal jsem se vyprovokovat příspěvkem na RC manii - FlyingRC F4 Wing kontrolér a ELRS a koupil jsem maličký flight controller který se u Číňana objevuje pod názvem "FlyingRC F4Wing Mini MK1 Fixed Wing Flight Controller F405"

Je to opravdu pidi záležitost, controller je destička 28 x 20 mm s hmotností 3g!
Rozchodil jsem to na stole s INAV 8.0.1 a přišla otázka, v čem to vyzkoušet. Jediné letadlo velikosti a ceny, kde by mi nevadil nějaký pád, byl malý Piper (Piper J3 Cub 1.1m).

Nepřišel jsem na řešení, jak Pipera vykuchat a dát vše dovnitř a tak jsem vyrobil díru v křídle a kablíky od serv a regulátoru jsem vytáhl ven z letadla. Na hřbet jsem vyrobil šasi, na kterém leží FC, přijímač a GPS. Původní přijímač šel do šuplíku. Vznikla taková demo instalace, říkám tomu DEMONSTRÁTOR. 😃
# diff # version # INAV/MATEKF405TE_SD 8.0.0 Jan 29 2025 / 16:54:15 (GITDIR-N) # GCC-13.2.1 20231009 # Outputs [servo] servo 1 1000 2000 1500 -100 servo 2 1000 2000 1500 -100 servo 3 1000 2000 1500 -100 # features feature -VBAT feature -TX_PROF_SEL feature -CURRENT_METER feature -BLACKBOX feature -OSD feature SOFTSERIAL feature GPS feature PWM_OUTPUT_ENABLE feature FW_AUTOTRIM # blackbox blackbox -NAV_ACC blackbox NAV_POS blackbox NAV_PID blackbox MAG blackbox ACC blackbox ATTI blackbox RC_DATA blackbox RC_COMMAND blackbox MOTORS blackbox -GYRO_RAW blackbox -PEAKS_R blackbox -PEAKS_P blackbox -PEAKS_Y blackbox SERVOS # Ports serial 0 64 115200 115200 0 115200 serial 1 0 115200 115200 0 115200 serial 4 2 115200 115200 0 115200 # Modes [aux] aux 0 0 0 1575 2100 aux 1 1 1 1275 1750 aux 2 2 1 1825 2100 aux 3 12 1 900 1150 aux 4 11 3 1300 1700 aux 5 10 3 1925 2100 aux 6 3 2 1325 1675 aux 7 56 2 1825 2100 aux 8 21 4 1375 1675 aux 9 13 5 1825 2100 # master set gyro_main_lpf_hz = 25 set dynamic_gyro_notch_q = 250 set dynamic_gyro_notch_min_hz = 30 set gyro_zero_x = 5 set gyro_zero_y = -15 set gyro_zero_z = -3 set ins_gravity_cmss = 1022.742 set gyro_adaptive_filter_min_hz = 20 set acc_hardware = ICM42605 set acczero_x = 100 set acczero_y = -158 set acczero_z = -42 set accgain_x = 4105 set accgain_y = 5660 set accgain_z = 4048 set align_mag = CW270FLIP set mag_hardware = NONE set baro_hardware = DPS310 set blackbox_rate_denom = 2 set motor_pwm_protocol = STANDARD set failsafe_procedure = RTH set align_board_roll = 40 set align_board_pitch = -100 set align_board_yaw = 1800 set vbat_meter_type = FAKE set small_angle = 180 set applied_defaults = 3 set gps_sbas_mode = EGNOS set gps_ublox_use_galileo = ON set airmode_type = STICK_CENTER_ONCE set nav_wp_radius = 800 set nav_wp_max_safe_distance = 500 set nav_rth_allow_landing = FS_ONLY set nav_rth_altitude = 3000 set nav_rth_home_altitude = 1000 set nav_fw_loiter_radius = 1000 set nav_fw_control_smoothness = 2 set nav_fw_launch_motor_delay = 100 set nav_fw_launch_max_altitude = 5000 set nav_fw_launch_climb_angle = 25 set nav_fw_allow_manual_thr_increase = ON set nav_fw_land_approach_length = 5000 # control_profile control_profile 1 set fw_p_pitch = 15 set fw_i_pitch = 5 set fw_d_pitch = 5 set fw_ff_pitch = 80 set fw_p_roll = 15 set fw_i_roll = 3 set fw_d_roll = 7 set fw_p_yaw = 50 set fw_i_yaw = 0 set fw_d_yaw = 20 set fw_ff_yaw = 255 set dterm_lpf_hz = 10 set fw_turn_assist_pitch_gain = 0.400 set nav_fw_pos_z_p = 25 set nav_fw_pos_z_d = 8 set nav_fw_pos_xy_p = 55 set d_boost_min = 1.000 set d_boost_max = 1.000 set rc_expo = 30 set rc_yaw_expo = 30 set roll_rate = 18 set pitch_rate = 9 set yaw_rate = 3 # mixer_profile mixer_profile 1 set platform_type = AIRPLANE set has_flaps = ON set model_preview_type = 14 # Mixer: motor mixer mmix reset mmix 0 1.000 0.000 0.000 0.000 # Mixer: servo mixer smix reset smix 0 1 1 100 0 -1 smix 1 2 0 100 0 -1 smix 2 3 0 100 0 -1 smix 3 4 2 100 0 -1 # battery_profile battery_profile 1 set throttle_idle = 5.000
Více o INAV a tomto FC a tomto letadle na stránce zde: Standardní postup v sekci Co s tím dělám já - aneb Můj život s INAV
