


Průchozí signál serva 
Všechny kanály, které jdou z vysílače a přes přijímač do FC nemusí být kontrolerem zpracovány. Mohou projít beze změny z jeho vstupu na jeho výstup. Zde připojené servo se bude chovat jako kdyby bylo připojeno k přijímači.
K čemu to je dobré? Chci například otáčet kamerou na letadle do stran. Třeba kniplem směrovky. Nastavím si v mixech vysílače výstup na kanál 4, vstup knipl směrovky. V INAV Configuratoru v záložce Outputs se ale nic při pohybu kniplem nehýbe. Je třeba i v systému INAV nastavit mixy.
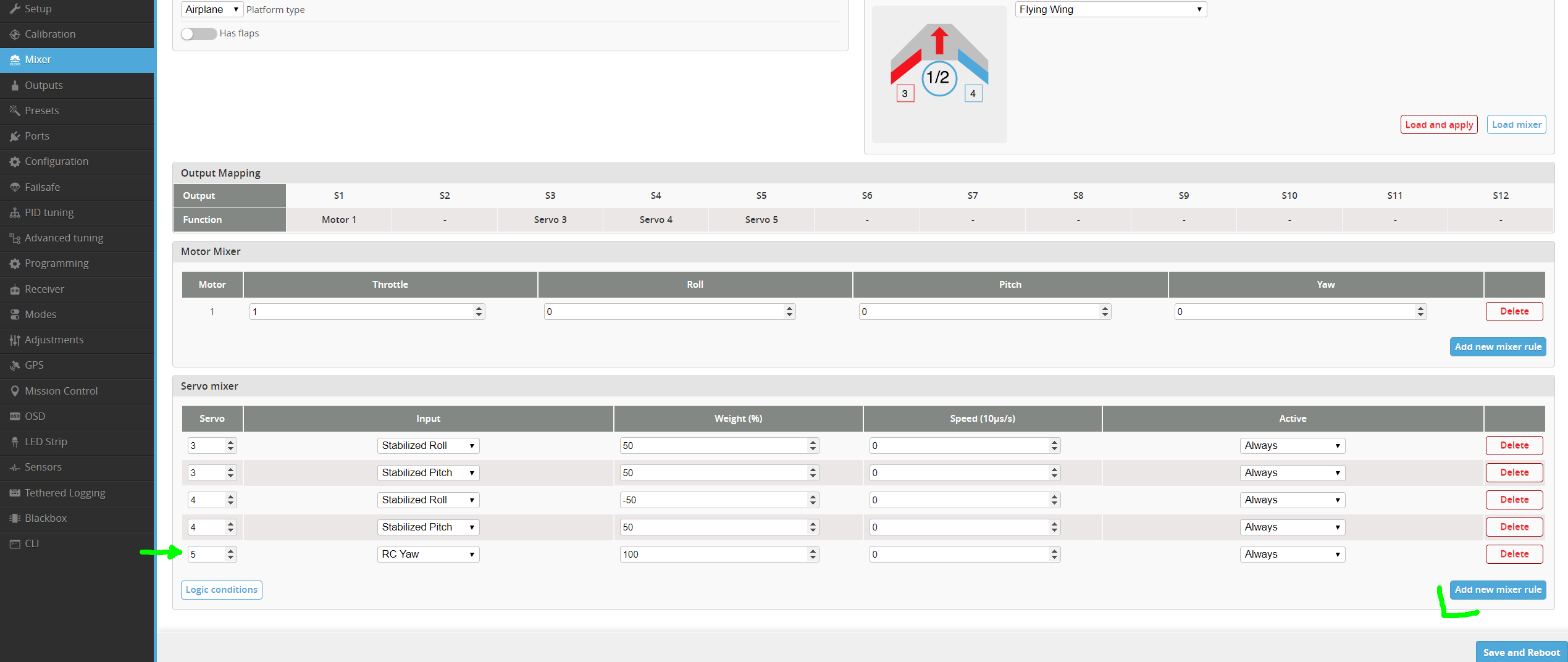
V záložce Mixer v bloku Servo mixer je tlačítko Add new mixer rule. Přidá řádek, kde ve sloupci Servo volím výstup, na který připojím servo - S5, ve sloupci Input kanál, který má na ten výstup procházet, to je čtvrtý kanál pojmenovaný RC Yaw (směrovka). Save a Reboot. Sloupeček znázorňující výstup 5 už není šedivý a hýbe se s kniplem směrovky, servo připojené na výstup S5 se začne hýbat spolu s pohyby kniplem směrovky.
V INAV se tomu říká channel forwarding.
(zveřejněno na stránce Tipy a postřehy)