Oživení flight controlleru - Oživení
| publikováno: | 13.02.2021, vydavatel a autor není-li uvedeno jinak: Libor Kolman, kolmanl@volny.cz |
| na http://kolmanl.info, v sekci Razor, na stránce http://www.kolmanl.info/index.php?show=razor_fcoziv |
Zadání a taktika pro další postup: nastavit samokřídlo s elevony a tlačným motorem, nejdříve pro let bez GPS.
Zdrojem pro mě je: INAV Fixed Wing Setup Guide
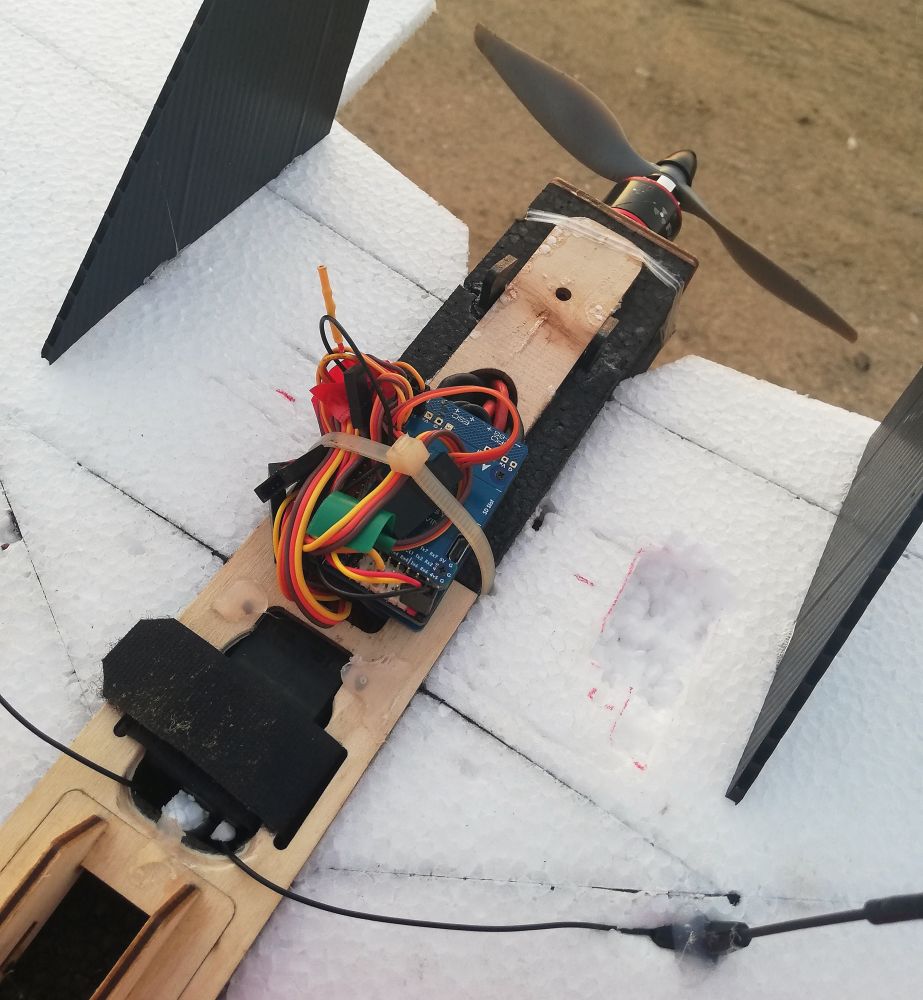
Propojení komponent:
- FC S1 - regulátor motoru (u regulátoru odpojit prostřední červený kablík +5V)
- FC S3 - servo levý elevon
- FC S4 - servo pravý elevon
- FC RX6 – přijímač signál SBUS
- FC 4V5 - přijímač 5V SBUS
- FC G - přijímač Gnd SBUS
- FC TX4 - přijímač signál Smart Port
- <nepřipojeno> - přijímač 5V Smart Port
- <nepřipojeno> - přijímač Gnd Smart Port
Nastavení se provádí v INAV Configuratoru, model musí být připojen k PC USB kabelem.
Poznatek 1: Je možné mít FC připojený zároveň k akumulátoru a zároveň k PC USB kabelem.
Poznatek 2: Před přechodem na další záložku nastavení je třeba kliknou na tlačítko uložení. Nastavení se pošle do kontroleru a ten se restartuje.
Poznatek 3: Výborným zdrojem informací je wiki - iNav wiki . Doporučuji číst si v ní.
Kalibrace
Ještě než jsem kontroler [FC] zabudoval do modelu, na stole jsem provedl Kalibraci. Teď kontroluji, zda Configurator zobrazuje aktuální polohu FC v prostoru – náklony. Vrtalo mi hlavou, zda ukazuje správně sever. Neukazuje a později jsem zjistil, že to není podstatné.
Vysílač
Důležité je připravit si vysílač. Nastavuji si ve vysílači (FrSky Taranis Q X7) nový model se třemi kanály: motor, výškovka, křidélka. Žádný mixer. Vysílač jen přenáší do modelu pohyby kniplů.
Důležitý je smysl výchylek, jak jdou z vysílače:
- Roll, Pitch a Throttle reagují na pohyby kniplu
- knipl křidélek doprava – Roll na maximu
- knipl výškovky od sebe na potlačeno – Pitch na maximu
- knipl plynu od sebe do polohy plný plyn – Trhrottle na maximu
Když je smysl pohybu teploměrů iNav Configurator opačná, je třeba reverzovat kanál ve vysílači.
Nastavení
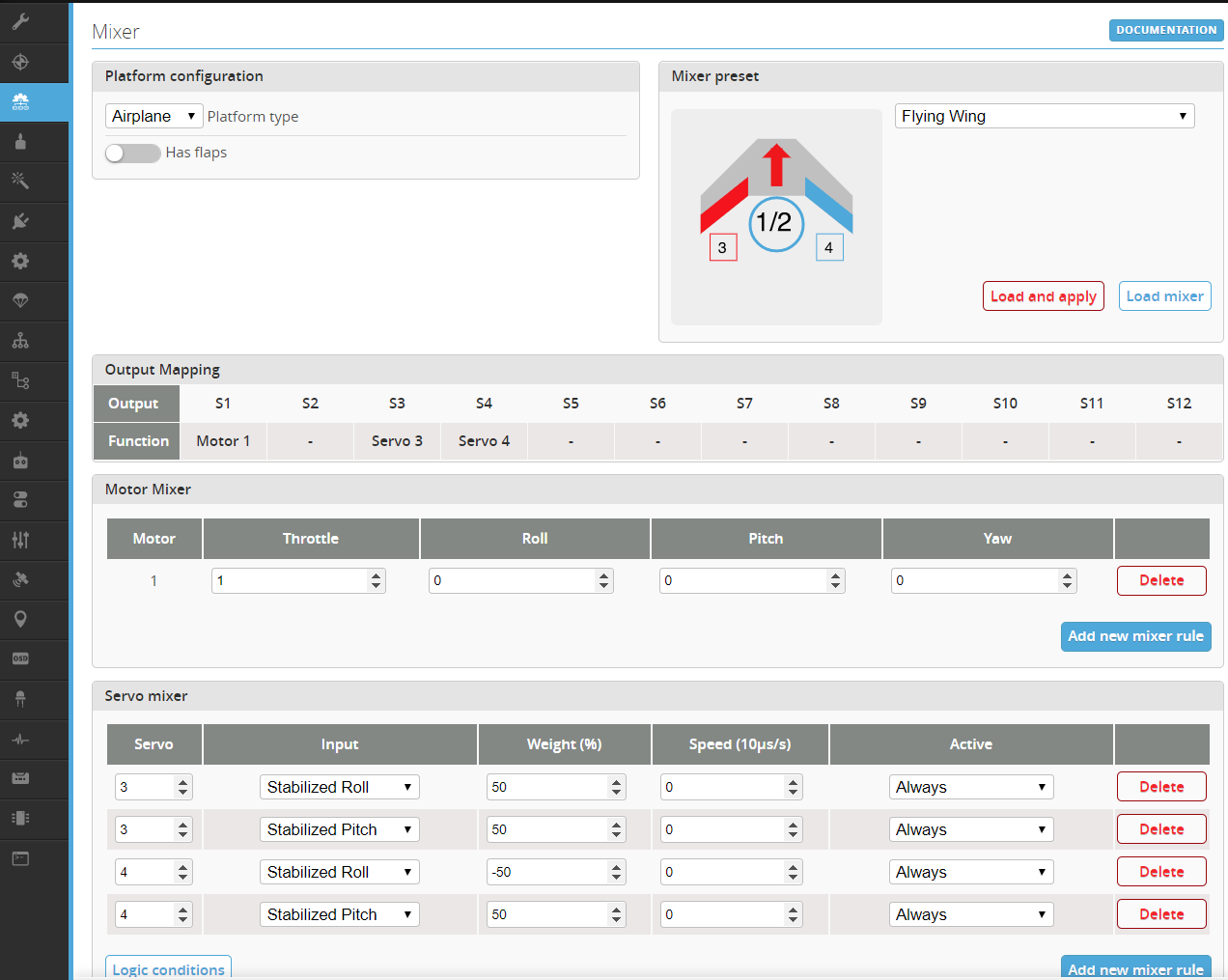
Nastavuji Mixer
nastavuji, že je model plošník, že nemá klapky a že je to samokřídlo. Program přednastaví mixer pro samokřídlo.
# smix
- smix 0 3 0 50 0 -1
- smix 1 3 1 50 0 -1
- smix 2 4 0 -50 0 -1
- smix 3 4 1 50 0 -1
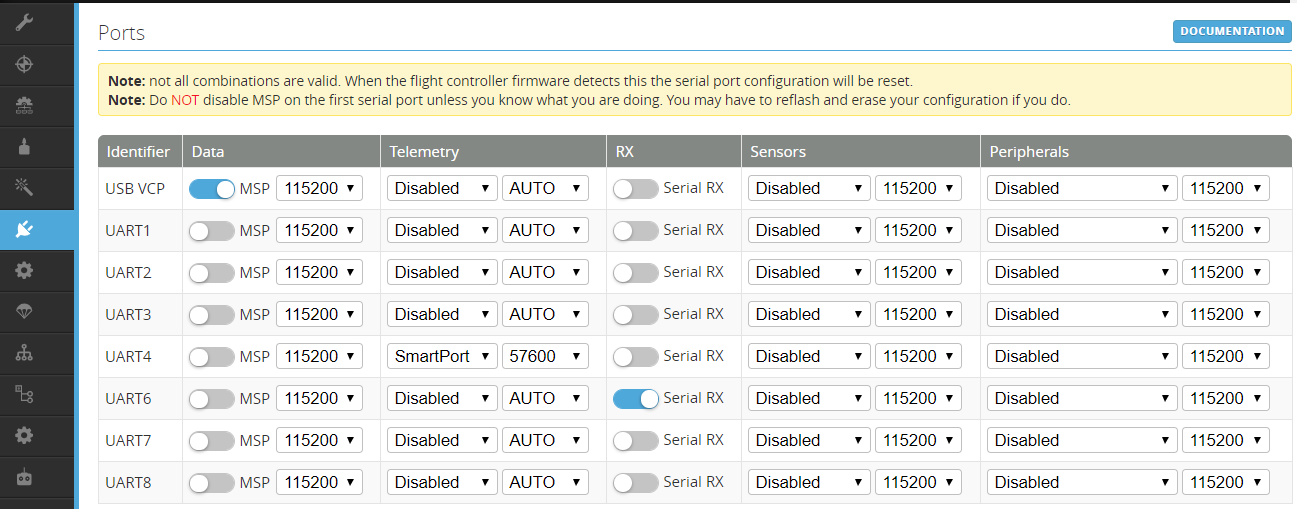
Další je záložka Ports. UART4 nastavuji SmartPort, UART6 nastavuji Serial RX.
# serial
- serial 20 1 115200 115200 0 115200
- serial 0 0 115200 115200 0 115200
- serial 1 0 115200 115200 0 115200
- serial 2 0 115200 115200 0 115200
- serial 3 32 115200 115200 57600 115200
- serial 5 64 115200 115200 0 115200
- serial 6 0 115200 115200 0 115200
- serial 7 0 115200 115200 0 115200
V záložce Configuration
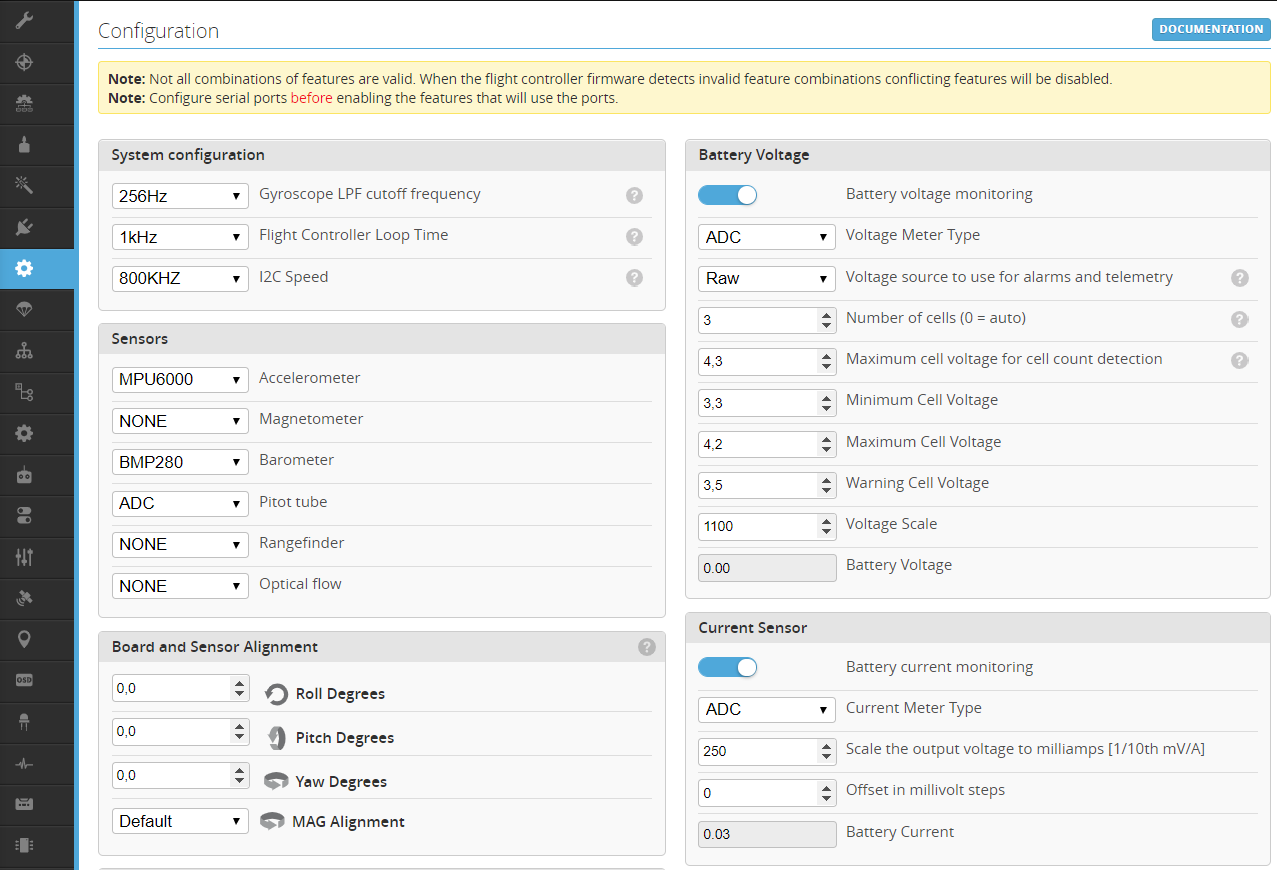
vypínám GPS, kterou v letadle nemám:
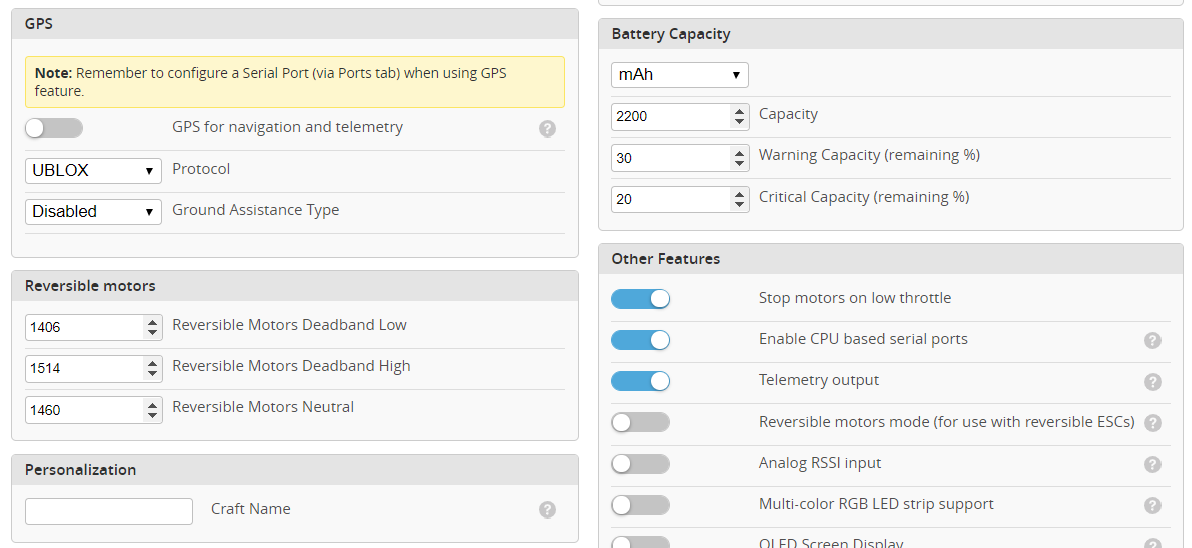
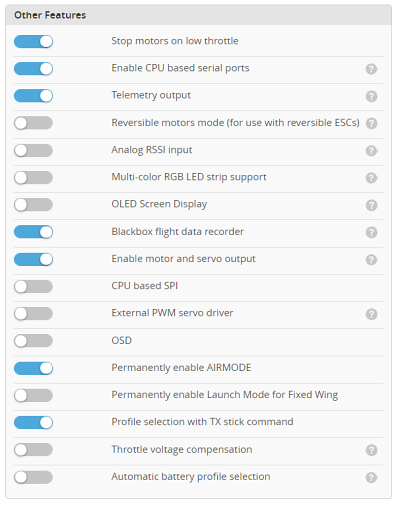
nastavuji kapacitu pohonného akumulátoru, povoluji telemetrii:
Smysl pohybů serv
Pohyby letadla a sledováním kormidel zjišťuji, zda není třeba některé servo reverzovat. Dělá se to v záložce Outputs v sekci Servos.
Ostatní nastavení
V záložce Failsafe nastavuji Land. Nemám GPS, chci, aby letadlo při ztrátě spojení padlo na zem a neuletělo mi.
V záložce PID tuning nechávám defaultní hodnoty.
Advanced tuning také přeskakuji, nemám v letadle GPS.
Programing vynechávám.
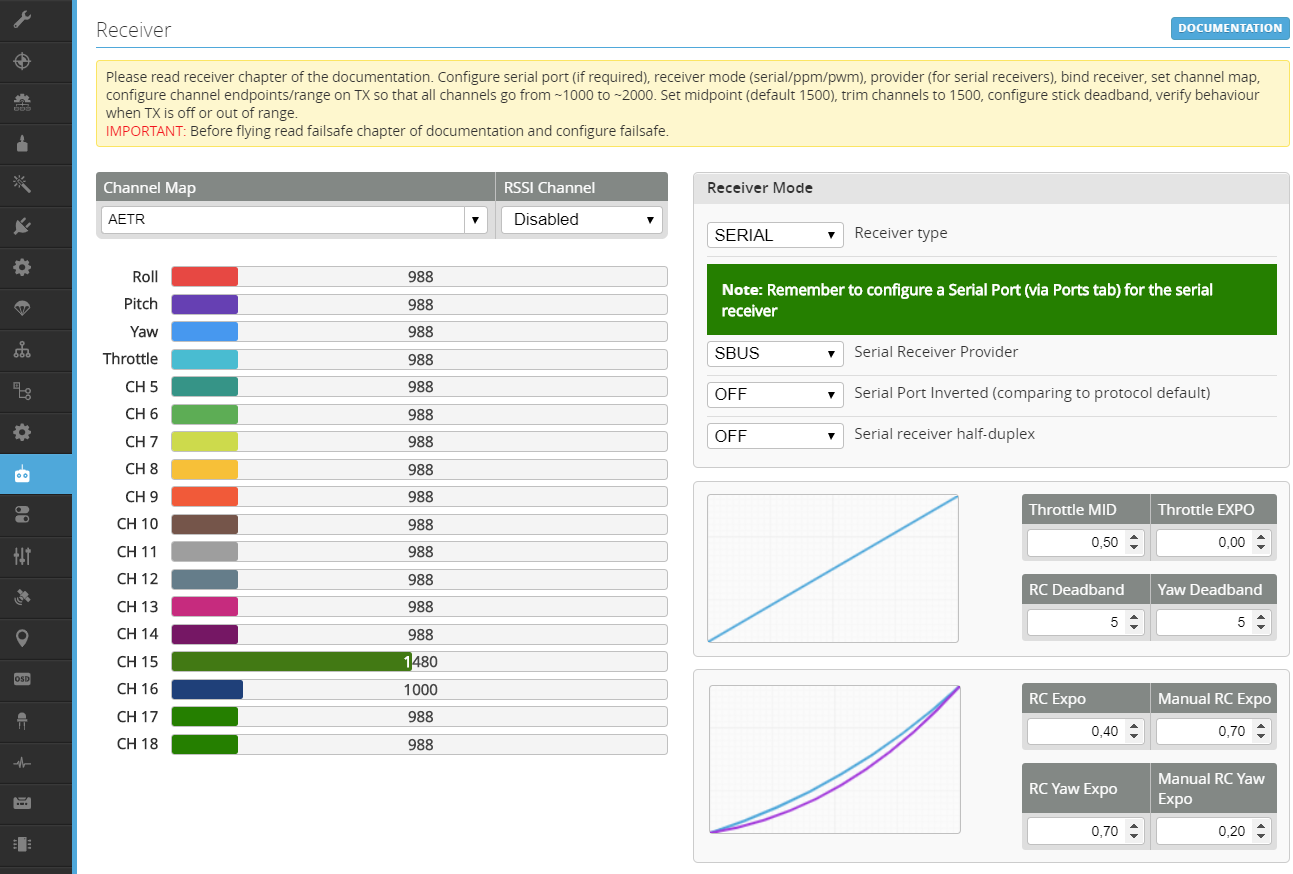
Záložka Receiver
- Chanel Map: AETR
- Received type: SERIAL
- Serial Receiver Provider: SBUS
- Serial Port Inverted: OFF
- Serial receiver half-duplex: OFF
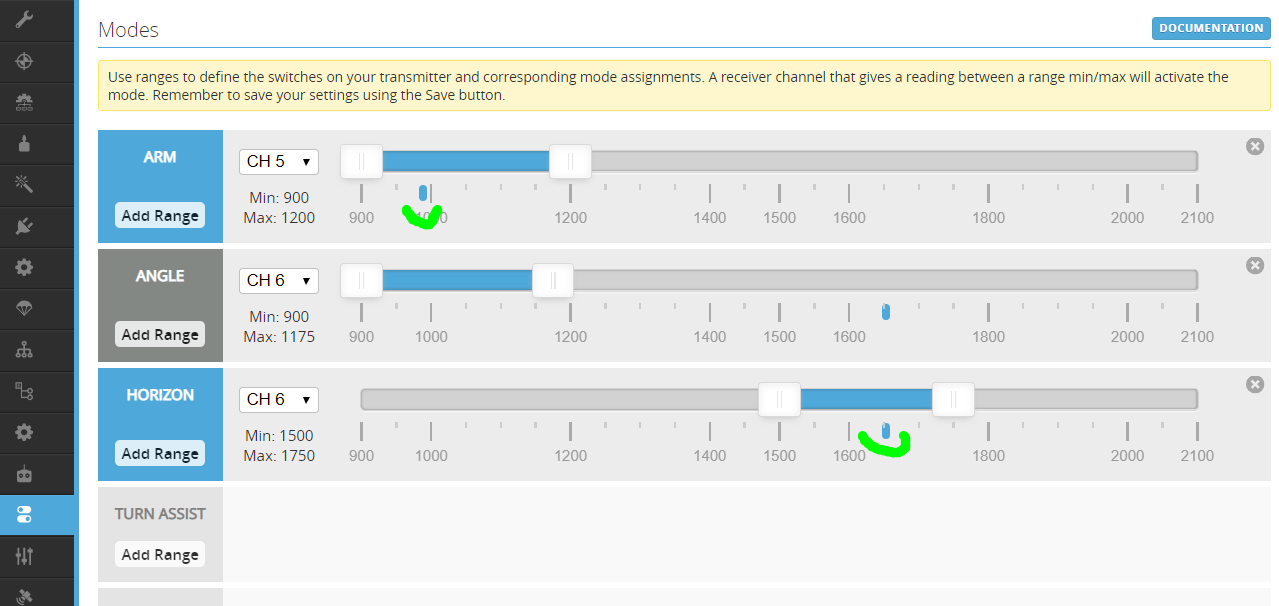
Ovládání režimů
Nastavuji ve vysílači přepínač pro ARM:
- přepínač SF
- kanál 5
- SF dolů – ARM - kanál 5
Nastavuji ve vysílači přepínač pro přepínání módů:
- přepínač SA
- kanál 6
- SA - MANUAL, ANGLE, HORIZON
Nastavuji ve vysílači posun kanálu 6 přepínajícího módy přepínačem pro ARM v pozici dis-arm tak, aby byl kanál mimo rozsah módů.
Kontrola smyslu výchylek serv
Kontroluji ještě na konec jako u každého jiného modelu správnost smyslů výchylek serv. Koukám na letadlo shora zezadu. Testuji v režimu MANUAL.
- knipl křidélek doleva – levý elevon se zvedne, pravý elevon jde dolů
- knipl křidélek doprava – levý elevon jde dolů, pravý elevon se zvedne
- knipl výškovky potlačit (od sebe) – oba evevony jdou dolů
- knipl výškovky přitáhnout (k sobě) – oba evevony se přizvednou nahoru
Kontroluji smysl uložení kontroleru v letadle. Při zapnutých režimech stabilizace
- sklonit čumák letadla dolů - oba evevony se přizvednou nahoru
- zvednout čumák letadla nahoru - oba evevony se sklopí dolů
- naklonit letadlo doleva – levý elevon jde dolů, pravý nahoru
- naklonit letadlo doprava – levý elevon jde nahoru, pravý dolů
Letadlo je připraveno k letu. Mělo by jít ovládat v težimu MANUAL jako model s klasickou instalací rádia. Není mi jasné, zda ho budu moci trimy na vysílači v případě potřeby vytrimovat tak, jak jsem u jiných modelů zvyklý, jsem zvědavý, jak se bude chovat, až ho přepnu do stabilizovaných režimů ANGLE a HORIZON. To ukáže zálet.
http://www.kolmanl.info